Leaderboard




Popular Content
Showing content with the highest reputation on 09/29/23 in all areas
-
“In a paper published today in Nature, the ALPHA collaboration at CERN’s Antimatter Factory shows that, within the precision of their experiment, atoms of antihydrogen – a positron orbiting an antiproton – fall to Earth in the same way as their matter equivalents.” https://home.cern/news/news/physics/alpha-experiment-cern-observes-influence-gravity-antimatter1 point
-
1 point
-
Exactly. Subtract 8 from 24 24-8=16 (waking hours) Multiply by 3600 (seconds per hour) 16*3600=57600 Divide by 10000 (ads per day) 57600/10000=5.76 seconds per day available to see an ad with the minimum estimate of 4000 ads you get 14.4 seconds. Still not very believable. There wouldn't be time for anything else. Your screen or interface might "see" those ads. You don't. That's why they hire so-called attention-engineers.1 point
-
You touch paper money or door handles every day, right? And you don't panic about it? Then there is no reason to freak out about a used laptop.. ps. You should worry about computer viruses and Trojan applications on it..1 point
-
You can stop worrying. 2 months of dry conditions will kill most bugs- regardless of whether we are talking about bacteria viruses or what.1 point
-
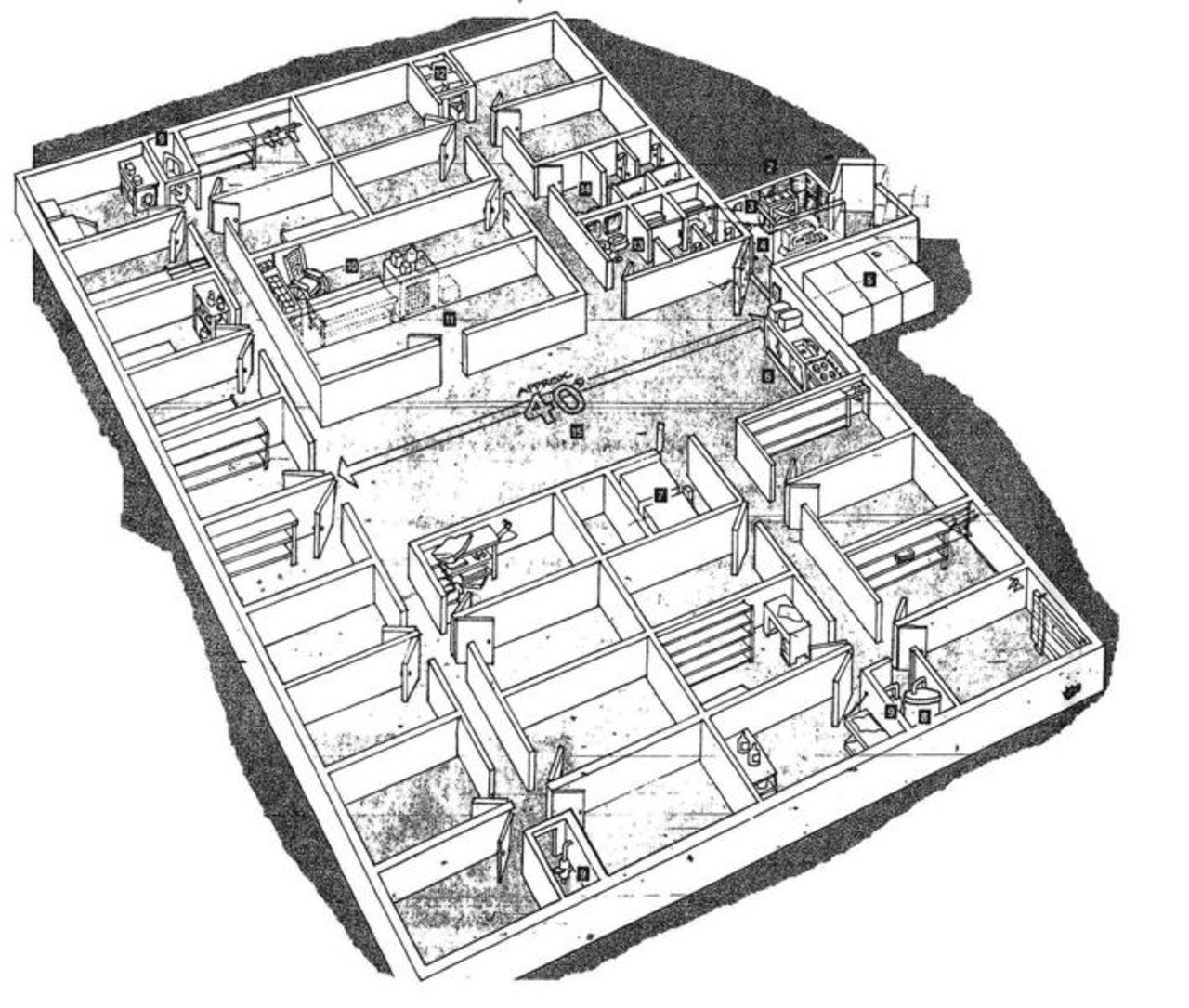
Yeah, ironically Disney wouldn't be the worst spot to take refuge. They're mostly dilapidated today, but people built a crazy number of true underground shelters here too. https://www.orlandoweekly.com/orlando/inside-the-forgotten-mount-dora-catacombs-the-nations-largest-subterranean-bomb-shelter/Slideshow/30946612/30868492
 1 point
1 point -
Yes, that’s fine, you can always do this. Several such reformulations already exist. Proper time is defined to equal the geometric length of the clock’s world line through spacetime - this is very convenient, and greatly simplifies much of the maths. While it is certainly possible to make other choices (affine parametrisation), I don’t know why you would. But so far as I can see this doesn’t lead to any different geometries - you’re still dealing with the same geodesics on the same manifold, you’re just parametrising them differently. Connections are not derived from metrics, they are separate and more fundamental structures. The LC connection is a very specific one, namely that for which torsion vanishes. Without intending any disrespect, but it seems like there’s some confusion here about the meaning of “metric” and “connection” in differential geometry, because what you write above doesn’t make any sense. The connection exists quite independently from metrics and coordinates; its purpose is to relate tangent spaces at different points of the manifold to one another, so that a covariant derivative can be defined. A metric provides a way to define an inner product for vectors and forms, and thus a notion of lengths, angles, volumes etc. These are different things, and you can have a connection without a metric on your manifold - this allows you to do a certain amount of topology, define parallel transport, as well as tensor fields and some operations between them (excepting index raising/lowering, which requires a metric). Choosing a different metric thus has no bearing on your connection at all, it only changes the measurements of lengths and angles. Standard GR uses curvature on a semi-Riemannian manifold to model gravity. An example of an alternative approach is teleparallel gravity - here you use a parallelizable manifold and endow it with a Weizenböck connection, which yields a situation where you have no curvature at all, but only torsion. So gravity here is described solely through torsion on parallel geodesics, with the field equations adapted accordingly. If I understand you correctly, that’s an example of what you mean by “different geometry”. A second example would be Einstein-Cartan gravity - here you choose a connection that allows both curvature and torsion, and adapt your field equations accordingly. A third example is the ADM formalism - you replace your manifold with a foliation of 3D hypersurfaces, and wrap all your dynamics into how these surfaces are related to one another, using the Hamiltonian formulation. And there are many more such formalisms. Do note that these are all specific examples of gauge theories - which is kind of the overarching framework when it comes to “different geometries”. Is this helpful?1 point
-
I suspect that the critical word is "Pastor."1 point
-
That's an example of how statistics and lies can be interchangeable. The critical word is "seen". Nobody is likely to see 10,000 ads in a day, or even 4,000. Because you see with your brain. Your eyes might encounter a lot of ads, but how many does your brain actually see?1 point
-
"Antimatter falls like matter" Says clumsy scientist who dropped it.1 point
-
Adobe or some form of cob construction has been used in many parts of the world for millennia. https://www.nationalgeographic.com/environment/article/why-these-west-african-architects-choose-mud-over-concrete https://regenerativeskills.com/articles-1-2016-5-24-cob-getting-to-know-one-of-constructions-most-ancient-and-versatile-materials/ https://thefifthestate.com.au/innovation/materials/new-meets-old-cob-houses-enter-the-twenty-first-century/ in hot and cold climates, as its insulating properties are equally effective against both extremes. It's a whole lot more cost-effective than drilling rock and allows for more configurations as well as more functional interior spaces. It's happening. Well, a big rock would be earthquake proof, so long as it wasn't a seaside cliff, but they are hard to move from inland, so the people would need super fast transport tunnels to get to a city. Unless their work space was in their home. You know there are already plenty of existing and abandoned mines where all the blasting has been done already. I wouldn't want to live in one - especially near the San Andreas Fault, but it's hot and growing hotter by the year in New Mexico, Nevada and Arizona, too, where people might not be very keen on having monumental rock formations destroyed.1 point
-
! Moderator Note Please tone down the preaching. You can support the arguments you're making without soapboxing about it.1 point
-
Yes, some berm house are made by building up soil rather than major excavation. They're left open on the front but with soil built up everywhere else then stabilized with sod. I was unfamiliar with Disney tunnels, our family was never into theme parks like that. So I looked them up, learned that Walt saw a cowboy walking through Tomorrowland on his way to Frontierland and felt that messed up the guest experience. Which led to the utilidor system. https://en.wikipedia.org/wiki/Disney_utilidor_system Sounds like the sort of places people take refuge in an apocalypse novel. Your termite mound sounds similar to the sci-fi concept of the arcology. I have reflected on the inefficiency of having stoves that release their heat into an air conditioned house, or fridges that also do that. In the USA, the range hood is a rudimentary approach which vents some of the heat. In the 19th century through the early 20th here, some homes had "summer kitchens" and a stove would be set up in an enclosed porch so that its heat wouldn't go into the home interior.1 point