
joigus
Senior Members
-
Joined
Everything posted by joigus
-
 Right. He's an elephant-in-the-living-room kind of president we've never seen before. Literally and metaphorically.
Right. He's an elephant-in-the-living-room kind of president we've never seen before. Literally and metaphorically. -
I hope you're right. And your prediction seems very likely to come true. But another very worrying matter at issue should be the damage that the incumbent is doing by deciding not to brief the President elect on matters which are extremely important in a situation of national emergency. It seems to me that smooth transfer of power is not just a question about healthy institutions, important though it is. If national security weren't enough, there is an ongoing pandemic and it seems to be beyond his concern. I'd like to hear your --and everybody's-- thoughts about that. I have. I've just watched his reaction to Trump's tantrum and he was nothing if not reassuring.
Thanks a lot, Airbrush, for amazing pictures and captions with info.
Bouddi National Park (New South Wales, Australia.) This Australian National Park features the presence of sandstone, coloured by haloes of chemical change, brought up by differential oxidation of iron minerals in the presence of moisture (Liesegang rings*) as those in Maria Island presented in the previous series of photographs. ---------- (*) Liesengang rings are rings of chemical change that colour the interior of certain rocks. They are formed by oxidation of iron minerals due to moisture penetrating the rocks through their porous structure. Generally that moisture filters through fracture lines in the rocks, thus producing concentric rings towards the centre of the blocks that the fracture lines define. CREDITS: https://www.facebook.com/Geomorfologia.Para.Todos/posts/4021501111197661 (Translated from Spanish) (Geomorphology for everyone) https://forum.xcitefun.net/bouddi-national-park-australia-t83280.html
Thanks for keeping me informed, Mattiao. Yes, I think I do. I've got a couple of questions for you, though. Are you always working with one parameter, \( k \), and arbitrary number of equations? Are the equations always linear in \( k \)? I'll get back to you as soon as I've got more time to spare. Well done!
I'm waiting for the REAL religion to come around. So my faith is postponed. But he's building a temple, made of styrofoam. I'm looking forward to worship.
He would have the benefit of time. Americans would get used to this "new style," until American democracy would be distorted beyond recognition.
There are plenty of posts in these forums about time travel and the problems it poses: https://www.scienceforums.net/search/?&q="time travel"&search_and_or=or&sortby=relevancy Why don't you take a good look at them? You talk about time travel as if it were a familiar thing. How come? Are you coming from the future?
Forget about time travel. I wish ordinary travel were restored.
Yes, please, keep me informed. I'm glad to have you here, proposing interesting problems. Welcome to the forums!
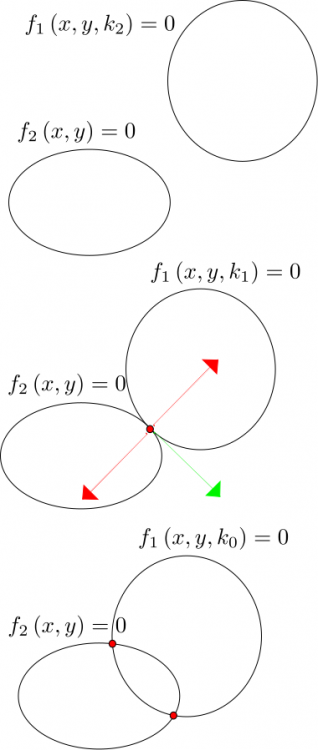
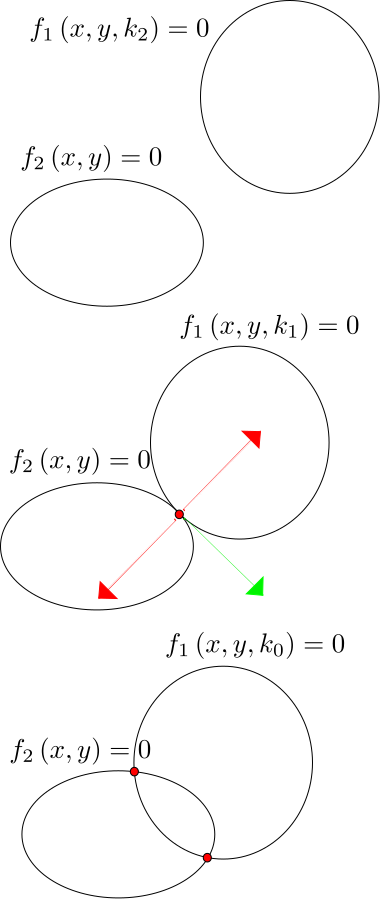
OK. I see what you mean much more clearly now. There's still something you've understood that I haven't. Problem is I don't have much time now, but I promise to get back. This was gonna be my drawing: There's an idea that maybe could work for the general case. I don't know. I'll get back to you ASAP. It's to do with the green and red arrows in the drawing. The co-tangential condition can be written as, \[\boldsymbol{\nabla}f_{1}\wedge\boldsymbol{\nabla}f_{2}=0\] It involves the determinant, \[\left|\begin{array}{cc} \frac{\partial f_{1}}{\partial x} & \frac{\partial f_{1}}{\partial y}\\ \frac{\partial f_{2}}{\partial x} & \frac{\partial f_{2}}{\partial y} \end{array}\right|\] It could work in the general case. I don't know. The problem is \( k \) doesn't appear there. Let's keep talking. No time now.
 Mmmm. I think I know what you mean now. When you said you obtained the solution you were looking for, did you mean (in the 1st, simpler, example)?: \[ x = 5 \left( 1 ± \sqrt{1- \frac{3}{125} k} \right) \] \[ y = 6 \left( 1 ± \sqrt{ 1- \frac{1}{45} k} \right) \] \[ K ≤ \frac{125}{3} \] Can you show me in more detail how you got to that by your method of adding a third equation? The equation you propose is, \[\left(-2x+10\right)-\left(-4x+20\right)=0\] That gives \( x = 5 \) as only solution, and I don't see how that relates to what you're looking for. Your 'tangency' idea got me confused, especially in combination with the Jacobian. Maybe I can't help you after all, but I think I'm closer to understand you and hopefully offer you some insight.
Here you have some help: The Jacobian is a matrix, not a simple derivative. I still don't understand why you want to apply derivatives when your equation can be solved exactly. Neither do I understand how an equation derived from the previous one gives you more information. I'm still missing it. I'm sorry. Maybe somebody else can help.
Can you be a bit more explicit about what you're doing there? Are those partial derivatives, implicit (as in \( \frac{d}{dx}=\frac{\partial}{\partial x}+\frac{dy}{dx}\frac{\partial}{\partial y} \). Do they involve K as a function of x and y, or as an independent variable? There are several ways to take the derivative with respect to x, and some of them are sorely wrong. E.g., are you considering, \[x,\:y\left(x\right),\:K\left(x,y\right)\] or, \[K,\:y\left(x,K\right),\:x\left(K\right)\] perhaps? And why would you want to involve a further equation which is implied by the previous two and contains, if anything, less information? I'm missing something in your argument. By the way, I made a mistake. It's, \[K\leq\frac{125}{3}\]
Because, as I told you, the non-linear system, \[− x^2 +10x − \frac{1}{2} y^2 +6y − K=0 \] \[− 2 x^2 +20x+ \frac{3}{2} y^2 − 18y=0\] decouples into, \[5y^{2}\text{−}60y+4K=0\] \[5x^{2}-50x+3K=0\] Which is trivial: \[x=\frac{50\pm\sqrt{2500-60K}}{10}\] \[y=\frac{60\pm\sqrt{3600-80K}}{10}\] Only solvable under the bounds, \[K<\frac{250}{6}=\frac{125}{3}=41.\overline{6}\] \[K<\frac{360}{8}=45\] The lowest upper bound being, \[K<\frac{125}{3}\]
No general rule in non-linear equations. This system is particularly simple because it's a 'scrambled' set of quadratic equations in x and y. You can un-scramble it easily, find the conditions for K, and overlap.
I am. For starters
How significant is the Arizona flip?
I don't know what the status of the question is, but this is exactly the part I didn't understand at all. It seems like Tina is reconsidering and I on my part think everybody is being considerate and trying to understand the problem. Not at all, @wtf. I think you understand it better than anybody else here. At least than me. I applaud your suggestion to start with simpler numbers.
I wouldn't be too surprised if there were something to those claims. During the Cold War there were similar episodes in science. Thank you.
1 is not a prime and those are not the first 23 primes. Don't trust me with numbers. The first 9 primes, I should have said. Thank you @studiot.
I was a bit surprised that such a simple formula would hold for a problem like this. Prime numbers are quite unpredictable. Prime gaps for example cannot be predicted by a general formula. So a formula giving all possible sum decompositions of products of primes... I didn't see the flaw in the argument, because I didn't see the argument. But again, number theory is not within my comfort zone.
I see what you mean. But I think we basically agree about that: So the decomposition of 223'092'870 into a pair of numbers x+y with x, y, not necessarily being prime, but being relative primes of 2, 3, 5, ..., 23, I think is the defining condition. I'm way past my comfort zone here. Fortunately @Sensei did it for all of us, and even though I'm not a great code reader, I think it's what the OP was asking.
Mmmm. I think I know what you mean now. When you said you obtained the solution you were looking for, did you mean (in the 1st, simpler, example)?: \[ x = 5 \left( 1 ± \sqrt{1- \frac{3}{125} k} \right) \] \[ y = 6 \left( 1 ± \sqrt{ 1- \frac{1}{45} k} \right) \] \[ K ≤ \frac{125}{3} \] Can you show me in more detail how you got to that by your method of adding a third equation? The equation you propose is, \[\left(-2x+10\right)-\left(-4x+20\right)=0\] That gives \( x = 5 \) as only solution, and I don't see how that relates to what you're looking for. Your 'tangency' idea got me confused, especially in combination with the Jacobian. Maybe I can't help you after all, but I think I'm closer to understand you and hopefully offer you some insight.
Here you have some help: The Jacobian is a matrix, not a simple derivative. I still don't understand why you want to apply derivatives when your equation can be solved exactly. Neither do I understand how an equation derived from the previous one gives you more information. I'm still missing it. I'm sorry. Maybe somebody else can help.
Can you be a bit more explicit about what you're doing there? Are those partial derivatives, implicit (as in \( \frac{d}{dx}=\frac{\partial}{\partial x}+\frac{dy}{dx}\frac{\partial}{\partial y} \). Do they involve K as a function of x and y, or as an independent variable? There are several ways to take the derivative with respect to x, and some of them are sorely wrong. E.g., are you considering, \[x,\:y\left(x\right),\:K\left(x,y\right)\] or, \[K,\:y\left(x,K\right),\:x\left(K\right)\] perhaps? And why would you want to involve a further equation which is implied by the previous two and contains, if anything, less information? I'm missing something in your argument. By the way, I made a mistake. It's, \[K\leq\frac{125}{3}\]
Because, as I told you, the non-linear system, \[− x^2 +10x − \frac{1}{2} y^2 +6y − K=0 \] \[− 2 x^2 +20x+ \frac{3}{2} y^2 − 18y=0\] decouples into, \[5y^{2}\text{−}60y+4K=0\] \[5x^{2}-50x+3K=0\] Which is trivial: \[x=\frac{50\pm\sqrt{2500-60K}}{10}\] \[y=\frac{60\pm\sqrt{3600-80K}}{10}\] Only solvable under the bounds, \[K<\frac{250}{6}=\frac{125}{3}=41.\overline{6}\] \[K<\frac{360}{8}=45\] The lowest upper bound being, \[K<\frac{125}{3}\]
No general rule in non-linear equations. This system is particularly simple because it's a 'scrambled' set of quadratic equations in x and y. You can un-scramble it easily, find the conditions for K, and overlap.
I am. For starters
How significant is the Arizona flip?
I don't know what the status of the question is, but this is exactly the part I didn't understand at all. It seems like Tina is reconsidering and I on my part think everybody is being considerate and trying to understand the problem. Not at all, @wtf. I think you understand it better than anybody else here. At least than me. I applaud your suggestion to start with simpler numbers.
I wouldn't be too surprised if there were something to those claims. During the Cold War there were similar episodes in science. Thank you.
1 is not a prime and those are not the first 23 primes. Don't trust me with numbers. The first 9 primes, I should have said. Thank you @studiot.
I was a bit surprised that such a simple formula would hold for a problem like this. Prime numbers are quite unpredictable. Prime gaps for example cannot be predicted by a general formula. So a formula giving all possible sum decompositions of products of primes... I didn't see the flaw in the argument, because I didn't see the argument. But again, number theory is not within my comfort zone.
I see what you mean. But I think we basically agree about that: So the decomposition of 223'092'870 into a pair of numbers x+y with x, y, not necessarily being prime, but being relative primes of 2, 3, 5, ..., 23, I think is the defining condition. I'm way past my comfort zone here. Fortunately @Sensei did it for all of us, and even though I'm not a great code reader, I think it's what the OP was asking.
Important Information
We have placed cookies on your device to help make this website better. You can adjust your cookie settings, otherwise we'll assume you're okay to continue.