John2020
-
Posts
356 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by John2020
-
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
How can they be cancelled from the moment the normal pair appears a constant angle even when you integrate 360° in regards to the axis of rotation? -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
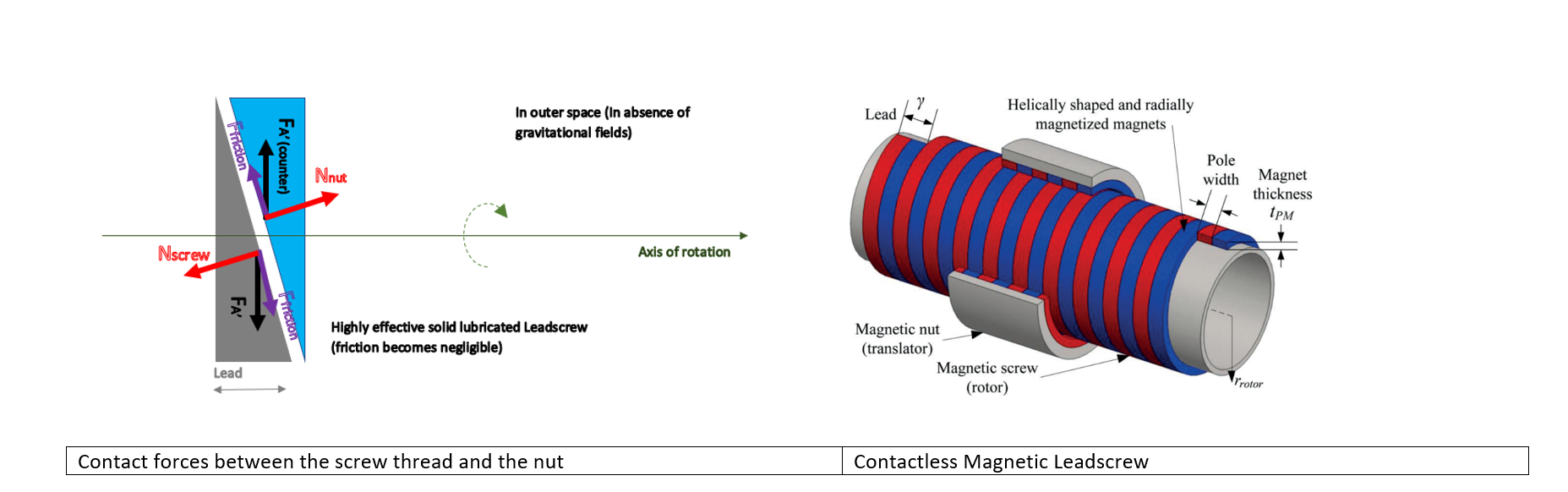
OK, however on the drawing with the thread I shared, the normal forces pair has an angle in regards to the rotation axis because of the inclination of the thread. It implies a small reactionless force will appear while the screw rotates by advancing m_T to the right. Increasing the length of the lead will result to more reactionless force. Isn't that confirmed by the drawing of the thread? Alternarively, when we replace the nut and the screw with their magnetic equivalents, there we have no contact forces. Wouldn't that increaee the available reactionless force? My own is much clearer as concept even if we don't agree. I couldn't understand of what he is talking about. I didn't start the subject with GR, you did and I fall into it. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
Correction: "the torque force (input) will be entirely converted into mass m_T change in momentum." -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
I completely agree with you. Please @swansont, @Ghideon , @joigus and @pzkpfw , I make the mistake and fall repeatedly in the trap to explain myself about things I don't even address in my work, therefore take attention only to the device which is the main subject of this discussion. I just would like to make clear the following: -I cannot address GR. -I cannot address QM and especially the physics behind a quasiparticle. Ignore about what I said about Polariton and stuff (it is not addressed in my work). -In my work, I just borrowed the definition of a theoretical quasiparticle (that may even doesn't exist) having a very special structure (presupposes that it has a mechanism to move by means of the supposed Euler internal force) in order to distinguish the supposed findings that apply just for the wider framework in Special Relativity (ignore this at the moment), in contrast to the known Einsteinian Special Relativity that applies just for bare particles e.g. electron (no structure, therefore it cannot be propelled by means of an Euler internal force since the mechanism is absent). -I may (as far as I can) address classical mechanics, without Hamiltonians and Lagrangians. -Take Fig.1-Lower and Fig.1-Upper as a Physics exercise given in High School and try to solve the following question: Having as knowns what is given in the drawings (don't involve motors, there are the forces instead there present), would the system (for Lower and Upper) acquire an acceleration? Initially, I would prefer to address the question in an ideal situation that does not involve friction and normal forces and later with friction and normal forces. I apologize @swansont. Sometimes I fall into the trap to assume what I see and describe is clear for everyone, however by mixing unintentionally definitions in the wrong place and time. When there is a conversion mechanism (leadscrew and nut), the input is the torque force (F_A) and the output is the force that appears perpendicular to the input that is responsible for the displacement of the mass m_T, in agreement with the definition of the mechanical advantage (see: https://en.wikipedia.org/wiki/Simple_machine).Additionally, we will ignore at the moment the rotation of the system due to the counter torque by assuming the torque force (input) will be entirely converted into mass m_T displacement. Yes, regarding the drawing with the normal forces, the normal forces represent the action-reaction pair and F_A the input to the conversion mechanism (leadscrew and nut). May I ask you something, because I am not aware in general about the Lagrangian formalism. What you write above is this because the entire system is considered as a point (in Lagrangian) as it is the case for bodies while solving problems, in general? If, yes could we use the known expression about the definition of the COM and the velocity of the COM as follow: \[\vec{r}_{CM} = \frac{1}{m}\sum_{i=1}^{n}m_i\vec{r}_i \\ \vec{u}_{CM} = \frac{d\vec{r}_{CM}}{dt}=\frac{1}{m}\sum_{i=1}^{n}\frac{d(m\vec{r}_{i})}{dt} \\ \vec{p} = m\vec{u}_{CM} = \sum_{i=1}^{n} \vec{p}_i\] With the above we may address all the parts of the system separately that may help identify which part could cause a potentially change in the COM of the whole system. Do you agree with this or am I wrong? -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
F_A is the action meaning the input force that creates the torque. The N_nut is the corresponding action and the N_screw is the corresponding reaction in Newton's 3rd, these are the contact forces (action-reaction) and not F_A (this is the input force). See wikipedia: https://en.wikipedia.org/wiki/Simple_machine (mechanical advantage). I use the notation _A to show it (perpendicular t0 the axis of rotation that implies is a torque force) in contrast with where it applies in regards to Fig.1-Lower (along the axis of the non-rotating unthreaded rod). I am late, I have to go to work. See you later in the evening. a) Keep it simple then. Instead of a hidden motor and energy, just imagine there is someone that creates a torque by using his two figures (F_A and F_A' couple) on the surface of the screw. b) Regarding the action-reaction symmetry, please check the references on my paper. They all speak about experimental evidence where the action-reaction symmetry breaks, especially in statistical mechanics and optics. This are the cases where "simply Nature does not work as we experience on a daily basis". I am not mixing anything. Use an inertial frame of reference and put the center of mass of the device to coincide with the beginning of the coordinate system (0,0,0). Then put an observer at the right end of the system (not on the rotating object) and describe what he sees. -About the cosmological stuff, let them for a future thread. -Bare particles means, no inner structure. Quasiparticle means a particle with something e.g. (https://en.wikipedia.org/wiki/List_of_quasiparticles) else that results in a new object. constant mass -> constant inertia or constant inertia -> constant mass variable mass -> non-constant mass (rocket) -> variable inertia variable inertia -> it can be constant mass with inertia imbalance (regarding the COM) that appears as being reduced I am late I have to go. The construction could be the mechanical analog of a Polariton (https://en.m.wikipedia.org/wiki/Polariton). Translation screw -> strong coupling of an electromagnetic wave Mass m_T (along with the rest of the system) -> with an electric or magnetic dipole carrying excitation. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
The normal forces (action-reaction pair) are those behind the pushing of nut as you also have mentioned in a previous post of yours. As you see these forces are not along the axis of rotation, however they help the nut to advance to the right. The drawing shows all the forces that appear between the screw and the nut. Make a search on the web and you will see. It didn't come out of my mind. I am here to discuss my work and not how this may affect GR or not. I am not the person who can judge this. Again, the problem the subject of this discussion is whether the device is a reactionless drive candidate. You need to address the last drawing I posted which is the heart of the problem. Good night! -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
I shared an hour ago a drawing of a thread and the forces that act upon it. The action-reaction pair is not along the axis of rotation. On the other hand, there is a drawing of a magnetic leadscrew which contactless. These two subjects need to be addressed from your side. I have to go to sleep is late midnight. See you tomorrow and thank you all for the today discussion. Be well! -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
What is OP? -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
The motor exerts a couple (FA and FA') on the translation screw and not on the nut. The nut is pushed by the action-reaction pair, namely the normal forces (you spoke about those in a previous post, so here they are). See you tomorrow I have to go to sleep (00:00 local time). -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
You don't need to make such exotic assumptions. A gravitational acceleration can be always counteracted by an inertial one. The only problem is if we may accept the possibility of a reactionless drive doing the job. This is the one of the two forces of the couple that creates the torque which applies perpendicular to the axis of rotation (exactly as it is shown on my first post). The source is provided by a brushless motor (and power) inside the housings. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
The drawing on the left, I drew it based on some other drawings found on the internet. The other on the right I made a screenshot from an online manual having some tests and description of how a magnetic lead screw works. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
You should have drawn the force between the two parts. The way you have drawn it appears as both being pushed by the force F. Check the drawing I posted (at the end of the 3rd page of this discussion) an hour ago having a magnified thread with all the forces that appear between the screw and the nut. Moreover, there is a contactless (no contact forces) magnetic leadscrew that needs to be discussed. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
I addressed GR based just on the information you provided. Now you are avoiding to address my answer. The way you presented the thought experiment is flawed because a gravitational acceleration can be counteracted by an inertial acceleration (even if we are not at the same page regarding the reactionless drive). If the reactionless drive concept is true in general (not because of my device) then, a gravitational acceleration can be counteracted by an inertial acceleration by means of a reactionless internal Euler force (this is what I can imagine to be possible based on known physics). -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
You are asking things that I am not aware of. What I may support (as much as I can) is what I share in my work. I cannot address General Relativity. Your thought experiment is flawed (better I would say, yours justification) for the following reason: The body creates a gravitational field (similar to earth's gravitational field) affecting the curvature of spacetime. The device cannot create a field of such gravitational intensity as the body e.g. earth, however it may counteract body's gravitational acceleration through an inertial acceleration by means of a reactionless internal Euler force in the opposite direction. Besides my device, counteracting the gravitational acceleration can be done through external forces (see rockets). -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
Have you ever thought that General Relativity is probably incomplete or better a subset of a wider framework like I did in my work about Special Relativity? The only problem in this discussion is whether we have a reactionless mass transfer or not? If it is possible then, General Relativity becomes automatically incomplete (better a subset of a wider framework) as I show this for Special Relativity and the Lorentz transformations. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
This is not an argument. You have to explain yourself. Could you tell us what General Relativity predicts? @swansont Note: The device is found in outer space (no gravitational fields are present) Here are my observations: a) The normal forces Fnut and Fscrew correspond to the Action-Reaction pair. b) The Action-Reaction pair is obviously not along the axis of rotation. c) Increasing the Lead length, will result in larger angle between the axis of rotation and the Action-Reaction pair On the other hand, we see on the right a contactless Magnetic leadscrew where the nut and screw do not contact each other. I am going again back to what I shared previously: In an ideal machine (it fits better the Magnetic leadscrew in this description) there are no losses due to friction since there are no contact forces. However, the action reaction pair does not disappear. My initial assumption was that in the ideal case, the action reaction pair appears perpendicular and tangential to the screw and nut. What is your view?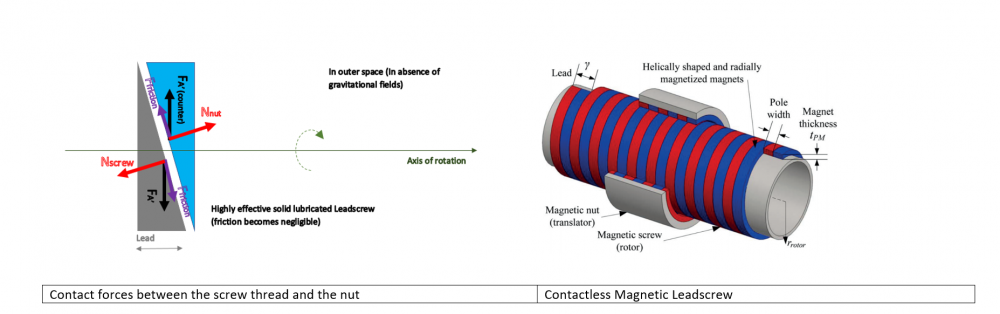
-
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
I am almost finished with the drawing that shows all forces (friction, normal and torque forces) in detail (I hope). What I don't understand on yours drawing is from where F came from. I haven't such in my drawing (pushing the nut from the left, only in Fig.1-Lower there is such situation). -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
I don't know what General Relativity predicts (I am less or almost not aware about it. Special Relativity is less complicated regarding the math (the math level I am aware of is at the level you see in my paper)), however according to my work it will behave as follow: a) Until one switches ON the reactionless drive, the gravitational pull will exert an attraction force to the drive that means it will start to accelerate towards the body b) When is finally switched ON, it will stop accelerating but since the acceleration of the drive is opposite, it will continue to move towards the body but now with a constant speed An alternative scenario: In case we introduce at the same moment the body and the reactionless drive switched ON then, it will eventually not move. In other words it will stay floating in outer space motionless. I am almost finished with the drawing that address swansont objections. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
Ok. Simplest thing then is to postpone discussion of those aspects of device until @swansont's objections are resolved. Understood. Within the next couple of hours I will share a drawing regarding the objections (mass pushes the thread etc,) of swansont. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
Later in the evening, I will present a drawing with the contact forces, friction and the force that creates the torque. Well, swansont is partially correct because the normal forces (contact) have an angle regarding the axis of rotation. It appears when the lead is larger, then more efficient will be the transfer of mass in real conditions, but here the system is ideal. Sorry, my mistake. I wanted to write "fictitious" See you later. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
Correct but not along the axis of rotation of the translation screw. Simply think no rotation for a moment and try to push the nut from the left. No motion will occur because of the threads. It implies while the threaded is rotating, mass m_T advances as being in a helix trajectory (to imagine this remove the guide bars and hold the nut with your hand) and not because of a real force along the axis of rotation as swansont also claims. I have to go to work now see you later. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
From the moment there is no real (as in Fig.1-Lower) force (no real force along the axis of rotation of the translation screw) and the mass advances as being in a helix trajectory, we have no reaction upon the rest of the system. I don't understand why you cannot see this. We place the device in an inertial frame of reference and an observer sitting inside the skeleton of the device but not on the rotating part. Please could you justify the following: a) What is the cause of mass m_T acceleration? b) Where would you draw the whatever force that would appear being the cause of mass m_T acceleration? It has the guide bars because otherwise the mass m_T would never advance to the right. Friction is always at play in this construction but we assume no dissipation of energy due to friction as also the rotational energy of the screw is converted entirely to mass m_T displacement (kinetic energy, fictional in our case). -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
The screw threads have an helix topology where the so called action-reaction pair follow this helix trajectory (being perpendicular to the momentum of mass m_T) and apply to mass m_T (action force) and the screw (reaction force) resulting in mass m_T advancing simultaneously in a linear way as seen from an external observer. In this regards, although the mass appears to be pushed (like cause by a real force), it is actually following an helix trajectory (when you remove the linear guides and hold the mass m_T) that is translated to a fictitious linear momentum (not a real force). It implies, from the moment this momentum is fictitious (not coming from a real force), there will be no reaction force upon the rest of the system through the rotation axis of the translation screw. Keep it simple. All the required information that we need to know in order to describe the working principle is present in Fig.1-Upper. It does not help to make this more complicated with motors, coupling parts etc. The couple (F_A and F_A') is also drawn in Fig.1-Upper, no need to mention motors about this. Regarding those @swansont mentioned about inertial and rotating frame of references, he would be right if I would have described the working principle using coordinates. I don't. I make again the following question (no need to address them with frame of references, just focus on the effects): a) Do we have a reactionless accelerating mass transfer or not? b) Is the rotating translation screw along with the drive nut (mass m_T) an intrinsic part of the system or not? The big picture is given by answering the above two straightforward questions. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
Did I use the word "reference"? No. I can call the rotating object as rotating frame, what is the problem? Did I use coordinates to describe my system? No. So please don't put words I didn't use in my mouth. Again, you do not take attention to what is shared so far. Fig.1-Upper presents an ideal situation where the rotational energy of the screw is converted entirely (without losses and no other conversions) to mass m_T kinetic energy (displacement) that implies, the chassis in this ideal situation will not rotate. -
Circumventing Newton's third law through Euler Inertial Forces
John2020 replied to John2020's topic in Speculations
3.Inertial frame:The rotating frame is an intrinsic part of the inertial frame that means the whole is considered as a single Inertial frame 4.Rotating frame: Euler force is the cause behind the acceleration of mass m_T without causing a reaction upon the rest of the inertial frame The (3) and (4) answer to your question. The system is one and is an Inertial frame, however it has an enclosed rotating frame that helps to transfer a mass without causing a reaction upon the rest of the system (Inertial frame). There is no magic, it is straightforward.