John2020
-
Posts
356 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by John2020
-
This is where you overlook the action of the fictitious force upon mass m_T. Could you please check Fig.1.Upper and reformulate your answer by considering the 18 points I shared above? Although I have never used or know about Langrangian formalism, I can understand some things about it (partial derivatives and stuff). I am almost arrivimg to my workplace. See you later! Have you ever see a device like I presented to have been tested as a reactionless drive candidate? I haven't as also there is nothing in the Internet, I checked it except from a patent (year 2016) I found recently. This patent utilizes several linear actuators for motion in space. It is the only patent found for such application. From my 20 years research on the subject of reactionless drive, the hundreds of papers, patents, web site content I read and some experiments conducted, wrote countless crackpot papers (yes real crackpot papers), this is the best and most satisfactory result I ever reached. I will upoad the link to my paper this weekend after correcting some definitions thanks to all of you. If the construction cannot work after conducting the experinent then what I shared above is nonsense. I have three controversial videos of a pure electromagmetic device I created 10 years ago. They were a couple of times in Youtube but since long I removed them. The system is a ferromagnetic ring that may pushes a car while being on board. I can share them on this thread if you wish as also with all the technical details. Again I found nothing similar in the entire web. Have you ever see a device like I presented to have been tested as a reactionless drive candidate? I haven't as also there is nothing in the Internet, I checked it except from a patent (year 2016) I found recently. This patent utilizes several linear actuators for motion in space. It is the only patent found for such application. From my 20 years research on the subject of reactionless drive, the hundreds of papers, patents, web site content I read and some experiments conducted, wrote countless crackpot papers (yes real crackpot papers), this is the best and most satisfactory result I ever reached. I will upoad the link to my paper this weekend after correcting some definitions thanks to all of you. If the construction cannot work after conducting the experinent then what I shared above is nonsense. I have three controversial videos of a pure electromagmetic device I created 10 years ago. They were a couple of times in Youtube but since long I removed them. The system is a ferromagnetic ring that may pushes a car while being on board. I can share them on this thread if you wish as also with all the technical details. Again I found nothing similar in the entire web. I have to work. See you later in the evening.
-
If reactionless drives are impossible according to Lagrange and Hamilton formulation then, this is an indication they do not utilize fictitious forces. Could you address the statements below? 1.Does Newton's 3rd law permits the existence of reactionless drives? Obviously, no. 2.Does Newton's 3rd law holds for fictitious forces? From the moment they do not possess reactions, the answer is again no. 3.Does Fictitious Force=Reactionless Force. Obviously, yes. So, by seeing the three statements above how one could change the CoM in order to trigger motion in an isolated system (power on board, translation mechanism etc.) without having a reaction force as result? Isn't that obvious the answer is the (3)? I think you confuse the tools with the essence of the foundations of physics. Advance maths are mathematical tools that are used to solve complex problems. They cannot introduce new physics or affect the foundations of physics. It always depends how one uses the tools. Again, if the tool apply to regular forces (non-fictitious) then forget about the reactionless drive. As you are probable aware about Lagrange and Hamilton formulations then, apply them to the construction I presented. Hint: Use fictitious forces, otherwise nothing will occur and you will waste your time. I have to go to sleep it is about 22.30 local time. See you tomorrow!
-
As I told you previously, I have no knowledge about Lagrange and Hamilton formulations. The question that arises now is, if Lagrange and Hamilton formulations always hold and assuming what I shared above is true then, could Lagrange and Hamilton formulations predict motion by means of fictitious internal forces? IF Lagrange and Hamilton formulations do not require fictitious forces then they cannot describe the motion of a reactionless drive. Whatever the so called advanced maths may one use, if the fundamentals are not met (see fictitious forces) then there is no chance to describe a reactionless drive.
-
In my first post I mentioned "The mathematical description assumes the reactionless drive (see Fig.1.Upper) is internally powered (motor and power supply on board (appears hidden in Fig.1 - Upper)) ", if it is that you think. The device has power on board although it is not shown, otherwise what I presented would be nonsense. The rest about how the device works I shared it above (18 statements in a row). As you may have seen up to now, there is no need to introduce new physics to create a reactionless drive but just to embrace and understand something that was up to now underestimated and this is nothing else than the nature of the fictitious force (known established Physics since centuries). Fictitious forces do not possess reactions, this is the golden key to reactionless drive.
-
You just found the key. Well, the way I presented my work it seems there is none, however the named from me induced forces F_AI and F_RI are in essence fictitious. I have to remove those definitions from my paper because as I see are quite confusing and to use clearly the definition "fictitious". The image in Fig.1-Upper exposes clearly the fictitious force at play (see how mass m_T moves to the right). In 30 secs, you will have the whole story. It is ready! Proof of concept in a list of statements OK, here is what according to my view how the construction in Fig.1-Upper may work (start to accelerate) . I will present it as a list of statements (like a test procedure) in order to become clearer : 1.Rotating frame inside an inertial frame 2.The inertial frame is governed by Newton's laws 3.The rotating frame is governed by Fictitious forces (I shouldn't call them induced, however they are somewhat induced too, as compared with action force F_A) 4.All the internal forces in the isolated system (Fig.1-Upper) participate in the rotating frame 5.A pair of non-constant (varying) F_A and F_A' forces are exerted on the surface of the translation screw, resulting in a torque and varying angular velocity of the translation screw 6.The translation screw starts to rotate clockwise 7.The coupled mass m_T starts to evolve counterclockwise due to the conservation of angular momentum (typical linear actuator application) 8.The motion of mass m_T, although evolves counterclockwise, appears an additional fictitious linear momentum 9.Mass m_T is in essence pushed to the right by the fictitious force F_AI 10.Fictitious forces do not possess reactions (I presented a mathematical proof without attributing the result to the fictitious forces) 11.The Newtonian Action force acts upon mass m_T and the Newtonian reaction upon the translation screw, however both are perpendicular to the Fictitious force and fictitious linear momentum of mass m_T 12.As one may see in Fig.1-Upper there is no reaction force being developed while m_T moves to the right since m_T is propelled by the fictitious force 13.The fact that fictitious forces do not possess reactions (Newton's 3rd law does not hold here), they are ideal to transfer mass from one point to another but inside the isolated system, causing a change in CoM 14.IF F_A and F_A' are constant then the angular velocity is constant as also the fictitious force is constant resulting in a constant fictitious mass m_T linear momentum 15.Due to (14) the mass m_T was transferred with constant momentum, the CoM changed but the system cannot accelerate (momentum conservation). Here we have no change in mass m_T momentum (since constant) 16.IF F_A and F_A' are not constant (see (5)) then the angular velocity is not constant as also the fictitious force is not constant resulting in a non-constant fictitious mass m_T linear momentum (change in momentum) 17.Due to (16) we have an accelerating mass transfer (accelerating change in CoM) 18.Due to (17) the CoM changes and system accelerates (momentum conservation). This statement may sound exotic and never experienced before in a real device. In a few words and following the assumed consistency of the previous statements, the system as a whole will be accelerated due to a fictitious force F_RI caused by the accelerating change in CoM.
-
It may very well be that it is because you are not seeing the whole picture. As I noted earlier, your drawings are missing notations. You also have not responded to some of my requests for clarification. I believe that when one finds the other keys, everything will become clear. Don't worry I will answer to your questions in time. I believe Einstein, use that quote to encourage people think out of maths first since that way you are more free to think (even outside the box). Correct, however the rotating frame delivers something useful that can be utilized in Newton's laws. Maybe I am wrong but Fig.1-Upper exposes it we like it or not. Should I disclose what I have in mind? I can be wrong as I said, however if I disclose it, the surprise will be ruined.
-
I agree.
-
No I don't. I am aware in terms of maths some classical mechanics, special relativity and elwctromagnetism. Math knowledge: 1st order differential equations, some vector calculus, something about integrals and derivatives. Aren't those enough one to describe the device in Fig.1? Or should I abandon this thread? Thinking on your feet is more important than knowledge. Eibstein used the word"imagination".
-
You are overreacting. Don't behave like those in NSF forum. Let people breath. Do you want to close this thread? Please do it.
-
Please don't be so hard. We are just making a discussion and I am not trying to sell anything. Does it sound selling or support the words "congratulations" and "well done"?
-
You are 50% correct. Try to think on your feet.
-
Well done! Since we are still in classical mechanics the key that leads to the solution of this puzzle is the rotating frame. Now check Fig.1-Upper and think on your feet. I am going to eat something and I will be back in a few minutes.
-
Congratulations swansont, you made it! Rotating frame is the correct answer. Now look at Fig.1 - Upper. Does it fill the bill?
-
I am driving back home and while reading the responses on this thread, I put myself in everybody position for a moment and I made the following thought: Why you cannot see what I see? Since I am not a physicist I see things from a different perspective and I use a slightly different language than you expect. When I looked to all requests to me to justify aspects of the concept I realized that we were actually not in tune (from joigus view this sounds as “not hearing criticism”. In text messaging platforms sometimes the written words sound differently, I can identify this with myself, too). Today, I conducted a quick search on the internet while I was working regarding the Action-Reaction law together with something else and I finally got it! In order to make it more interesting, I am not going to tell you why the construction will work (although I showed it a little bit in a different way), therefore I have the following challenge for you: When or what are the conditions where Newton’s 3rd law or Newton’s laws in general stop to hold as they are originally formulated? If you find the answer to this question, look at Fig.1 – Upper. From that moment you are 4 steps (four words) away from confirming the construction will definitely work!
-
Good morning Ghideon! I am a little bit late. I will try to answer this while I am in the bus to work and we will continue this conversation at the evening. On Friday evening and the coming weekend I will have more time available to clear out all these issues. Stay tuned! For the other stuff in the paper we need to open a new thread in case there is interest and after the completion of this thread. a) There is no external force acting on the box b) The box will start to accelerate by means of induced internal forces c) The dynamometer will show a reading e.g. 1N d) Let us say the mass of the box is 1 Kgr e) The reading of dynamometer is not aware the type of force being acted on the box (internal or external) f) Due to (e) we may use the F=ma-> a=1 m/sec^2 without knowing the propulsion mechanism of the box What you fail to understand is in case we have a box that moves by means of internal forces, we cannot describe the cause of motion through F=ma but just through measurements. I arrived at my workplace. See you later in the evening.
-
No I have not study Hamiltonian mechanics but what I have done in my paper is that I have applied these findings to special relativity and Lorentz transformations that lead to the discovery of a more general framework that is relevant for quasiparticles that may reach and even surpass the light speed without contradicting Einstein or Lorentz. The problem is addressed with very simple straightforward maths (no tensor, no Hamiltonians and no Langragians). It will be a huge challenge (since now comes Einstein and Lorentz in the picture) but I don't believe you want to see this, after the classical mechanics challenge I just presented. Otherwise, tell me to send you the link to my paper in private (through mail).
-
Your mistake is that you try to justify the motion of the system using the F=ma that applies for external forces. Moreover, you still ignore the possibility of change of CoM by means of induced internal forces as I presented above. As also collimear forces will not do the trick (see Fig.1 - Lower). I cañ show all these with the momentum conservation too. See you tomorrow. I have to sleep now.
-
Good night guys, I have to go to sleep and to wake up early tomorrow. Local Time is about 23.00. See you tomorrow!
-
I don't understand where I get contradictions. According to what I presented so far the findings are the following: a) Newton's F=ma addresses external forces in order a body (m) to accelerate b) Newton seems to have overlooked the nature of the induced mechanical force that is direction of rotation of the translation mechanism (screw) depended and processes all problems as being collinear forces. This works perfectly as long as these forces are external. c) We agree that collinear forces cannot move the center of mass, however due to the nature of the induced mechanical force it might be possible to move the center of mass through mass transfer. d) Something that none noticed so far is that I speak about systems with inner structure. The corresponding known body problems related to classical Newtonian motion, are always processed as point like. Considering bodies or systems as point like, they can never be self-propelled (they must have an inner structure) even if it was possible. e) A direct consequence of (d) is that bare particles e.g. electron cannot be propelled by means of internal forces. Quasiparticles e.g. particle trapped within a standing wave can be propelled by means of internal forces (by applying a standing wave phase shift) Electrodynamics Hint: Replace the translation screw mechanism and the rest of the periphery of the system with a standing wave. Replace m_T with the mass of a particle (trapped within the standing wave). Applying a phase shift, results in the phase shift of the nodes and the redeployment of the entrapped particle mass. This is not my discovery but of someone else and proves the idea of this thread with very simple trigonometric identities (just for the standing wave part). m_T is not refer to dm/dt but just to dm. The dm/dt is the mass transfer ratio. In our case (see Fig.1-Upper) the amount of mass being transferred is dm=m_T. The equation having the dm/dt addresses the general case (variable mass transfer ratio).
-
There are two issues here: a) Newton discovered the F=ma since all of his observation and experiments were related to external forces. b) Obviously, (a) cannot apply to what I presented here because in case the construction in Fig.1 - Upper works, the resulting motion is attributed to internal forces. This leads to what I mentioned on my first post which is Newton's laws of motion are probably incomplete.
-
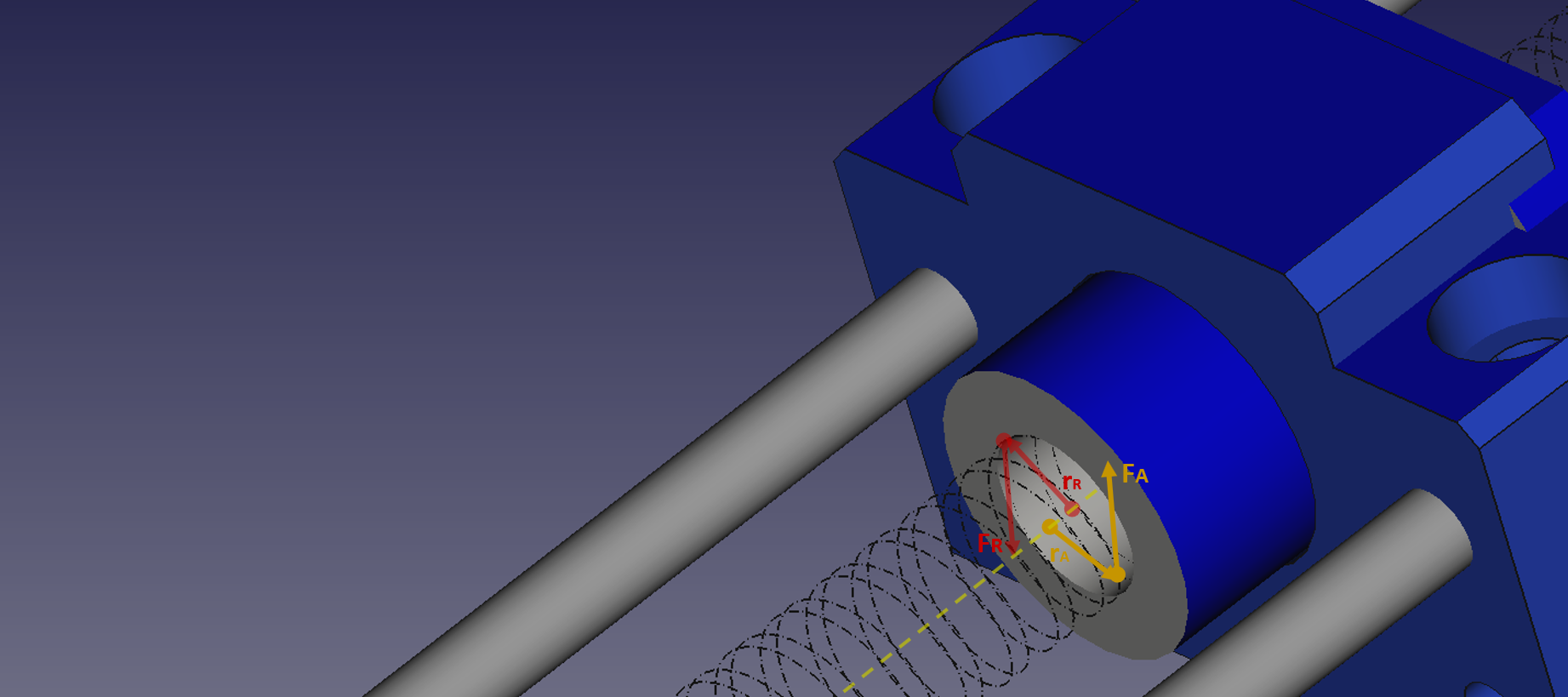
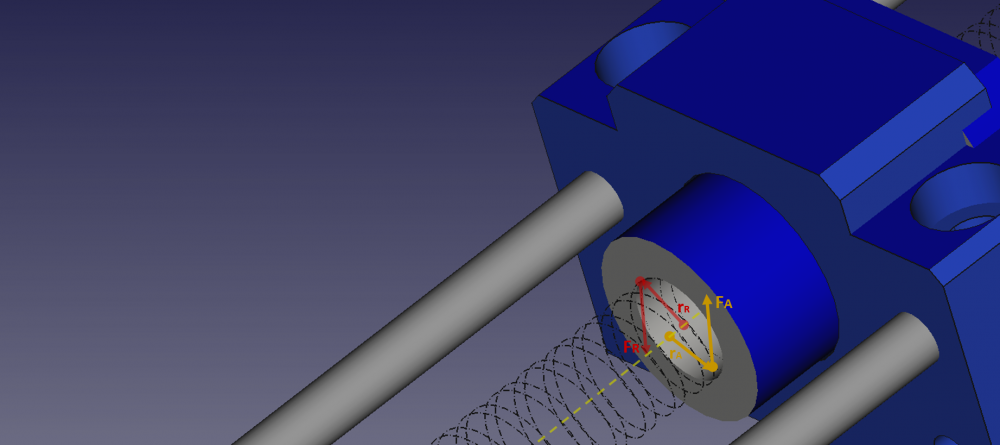
Obviously, the F=ma applies just for external forces. In order to find the equivalent external force that is required to achieve the same acceleration then: \[\vec{F_{internal}} = n_{r} m_{\mathrm{T}} \frac{\vec{u}_{rel}}{\mathrm{d}t} = m \vec{a} = \vec{F_{external}} \] @Ghideon @swansont and @joigus Induced Force Meaning: In Fig.1 - Upper the pair F_A (input force) and F_A' applies a torque about the axis of the translation screw having a clockwise direction. The resulting force (called output force, see wikipedia: https://en.wikipedia.org/wiki/Screw_(simple_machine) that pushes the mass m_T to the right is perpendicular to the action force and opposes (counterclockwise) to the cause that created it (clockwise direction) due to the conservation of angular momentum. It is similar to the electromagnetic induction and Lenz Law. Unfortunately, the definition "induced" was reserved just for the electromagnetism. Regarding the r_A and r_R, I created the following drawing: F_A is exerted tangentially on the translation screw that is always perpendicular to the m_T motion and F_R is the reaction force being exerted on the mass m_T or vice versa. The r_A is the position vector of the τ_A having as start point the center of the translation screw and end point the surface of it. The r_R is the position vector of the τ_R having as start point the center of the translation screw and end point the internal surface of the mass m_T.
-
@Ghideon In case there is no external force and there is no knowledge how the box moves then, it is required to measure the change in speed using a doppler like radar in order to calculate its acceleration: \[\vec{a} = \frac{\mathrm{d} \vec{u}}{\mathrm{d}t} \] Let's say now you are aware about the propulsion mechanism then (see last expression on my first post): \[\frac{\mathrm{d} \vec{p}}{\mathrm{d}t} = \sum \vec{F}_{ind} = -n_{r} \vec{u}_{rel} \frac{\mathrm{d} m}{\mathrm{d}t} \] The \(\mathrm{d} m \) on the mechanical construction (Fig.1 - Upper) corresponds to the quantity \(m_{\mathrm{T} } \), thus: \[\frac{\mathrm{d} \vec{p}}{\mathrm{d}t} = \sum \vec{F}_{ind} = -n_{r} \vec{u}_{rel} \frac{m_{\mathrm{T}} }{\mathrm{d}t} \]. Finally the acceleration of the system is: \[\vec{a} = n_{r} \frac{\vec{u}_{rel}}{\mathrm{d}t} \] @joigus As I mentioned above I have some time in the evening (due to a daily job) to respond, therefore please be patient. I am working on this. I cannot draw r_A and r_R on the image I shared (it is a 2D without a third dimension perspective). I am working on a new drawing to show all these. It will take some time. Stay tuned!
-
@joigus Hi joigus! Let's start first with the above. As I mentioned previously my paper justifies the use of the rocket equation as follows: "The rate of mass ejection corresponds to a mass transfer from the system’s interior to a point away from it (rocket) after a time interval, without affecting its center of mass. From a purely mathematical perspective, a second interpretation is also possible. An internal force causes a mass transfer between two points inside the system, resulting in a change of system’s effective inertia (reduction) after a time interval.". These two views can be described with the same rocket equation. Seeing the reactionless drive from the point of an external observer and have no knowledge of what is going on inside, its motion can be justified just by a change of its inertia (caused by the internal mass transfer) or better reduction of its inertia (gain of inertia would never have as result, motion). The only thing that needs to be clarified regarding the rocket equation is the (-) sign in front of the mass transfer. Since the mass transfer itself is not a negative quantity (see ejection), the (-) is justified (see my first post) by the induced torque. As you see the translation screw rotates clockwise and the mass evolves counterclockwise (to the right) which is something known from the mechanism of the linear actuator. Mathematically is justified as follow: \[ \overbrace{\sum \vec{\tau}_{T}}^{\curvearrowleft} + \overbrace{n_{T}\left(\left(\vec{r}_{A} - \vec{r}_{R} \right) \times \vec{F}_{A} \right)}^{\curvearrowright} = \vec{0} \] What requires further justification is what Swansont correctly noted and this is the r_A and r_R along with the corresponding torques.
-
The answer to your question is given by the last six expressions of my first post where center stage has the rocket equation that may apply for the change in the CoM (see my posts above). As I mentioned above an external observer may justify the motion of the isolated system (no external forces) because of the change in CoM that implies reduction of the effective inertia, otherwise motion cannot take place. Swansont and generally in established physics supports no change in CoM by internal forces and more accurately by collinear internal forces action - reaction). This is what I also support with the construction in Fig.1-Lower (rod with no threads. I am now driving back home. In a couple of hours I will post more stuff (questions and answers).
-
Yes, what you presented above is what is expected. I have a daily job and at the moment I am having a meal pause (Local time UTC+1). Don't worry I will answer all of yours questions. Swansont is right. The position vectors and the torque vectors must be visible in the drawing, otherwise the concept is unclear. I hope I can find some time this evening to answers all those questions. In the meantime, the nut (m_T) evolves around the screw that means the Newtonian Action-Reaction is perpendicular to the direction of motion of the nut itself. Having the nut a constant translation speed appears no change in momentum that leads to no change in momentum of the system as a whole. IF the nut changes its momentum then, this will be reflected to the entire system where due to momentum conservation the whole system will follow the direction of the nut (since there is no force opposing the momentum of the nut). Note: Action-reaction Newtonian forces are developed perpedicular to nut momentum.