

Kassander
Senior Members
-
Joined
-
Last visited
-
 I'm delighted to hear that you found my work useful. If you have any further questions or would like to discuss it in more detail, please don't hesitate to reach out. As the title suggests, there is still more to be published on this topic.
I'm delighted to hear that you found my work useful. If you have any further questions or would like to discuss it in more detail, please don't hesitate to reach out. As the title suggests, there is still more to be published on this topic. -
I'm not sure if this will help you, but I have developed a new representation for prime numbers. To be precise, the composite numbers are represented, which also makes the prime numbers visible. As I have described in my publications, this reveals new patterns that can be of importance for prime number research. https://www.academia.edu/126146000/A_Novel_Visual_Representation_of_Prime_Number_Distribution_Interval_Graphic_Foundation_for_Further_Studies_ The special thing about this graphic, which I have called " Interval-Graphic", is that it combines many theories about prime numbers. On the one hand, it works in a similar way to the Sieve of Eratosthenes, which gradually eliminates more and more multiples of prime numbers and thus makes smaller prime numbers visible. On the other hand, Euclid's primorial and the Euclidean numbers around it can be made clearly visible. Prime number tuples such as twin primes are also visible in this way. It also becomes clear how they are created. Dirichlet's theorem is also visible, as are prime number gaps.
-
I know he is a classic troll, but I still thought it was important to refute arguments and rhetoric. Even a troll can provide good templates for making your own position public.
-
Nobody knows whether he will live to see the next day or not, whether he believes in God or not. This doesn't seem to have any relevance to the topic.
-
I'm not sure if I understand you correctly, but I think it's absolutely possible to be grateful that a new day full of possibilities has dawned without God being responsible for the movement of the heavenly bodies. If someone believes in a God, they can still be grateful to God for it, and if someone doesn't believe in a God, they can also feel gratitude towards the world. I don't know if you "have to" be grateful for that, that's more of a philosophical question. But a God who is responsible for scientific phenomena doesn't seem necessary to me.
-
In the course of the Enlightenment, the world was increasingly better understood and God was increasingly pushed back as an explanation. At first he was said to be responsible for the weather, today we know better. He was said to be responsible for health but also illness, today we know better. He was said to be responsible for natural disasters, today we know better. He was said to be responsible for the creation of the earth, today we know better. The more we discovered and the more we learned, the more God became superfluous and we began to understand that the universe functions without him. Therefore, modern theologians no longer try to use God as a hypothesis for scientific phenomena such as the phenomenon of the origin of life that you described. Instead of having God carry out scientific tasks that are not necessary from a theological point of view anyway, modern theology is more concerned with the philosophy of religion. What place it can have in our everyday lives, which questions religion can answer and which it cannot. There are less serious religious movements such as creationism, which still tries to make God do unnecessary scientific work, but most serious theologians no longer want to push God into the gaps in science. This came to an end in the 19th century. One should therefore be very cautious with religious movements that want to connect God with science. Here the focus is often more on making money than on an intellectually productive communication of faith.
-
This question deals with the core of the theory of relativity. According to Einstein, light in a vacuum always travels at the same speed, regardless of whether the light source or the observer is moving. That is why the theory of relativity is called the theory of relativity. So from the point of view of an observer, light always moves at the speed of light. In relation to light: From our perspective, light always travels at the speed of light. This is a fundamental property of the universe and does not depend on our motion relative to other objects. In relation to the Earth: The Earth is moving through space, both orbiting the Sun and traveling within the Milky Way. However, this motion does not affect the speed of light relative to us because the speed of light remains constant for all observers. In relation to ourselves: Whether we are moving relative to other objects or standing still, we always observe light traveling at the same speed. This is the core principle of the special theory of relativity: the speed of light is constant for all observers, regardless of their relative motion.
-
I think you essentially want to point out that in current theories, dark matter is only used to explain the problem of stars moving too quickly in the outer region of galaxies. You offer an alternative explanation that the gravitational pull that galaxies exert on each other is the cause and that dark matter is not necessary. As an explanation for the previous calculation results that require dark matter, you say that the error lies in the fact that, due to the fact that light only moves at the speed of light, the current position of the galaxies deviates from the positions at the time they emitted the light and you assume that this is why the calculations are wrong because gravity would emanate from the current position of the galaxies. But this is exactly where the error in your assumption lies. Gravity also spreads at the speed of light. This means that all objects that we can observe in the universe always exert their gravitational attraction from the point at which we observe them, regardless of where they actually are at that time. Because gravity and light move at the same speed. However, it becomes much more difficult when you consider that we as observer A are at a different distance from a gravitational source B than this gravitational source B is from a gravitational source C. Let's assume the distance from A to B is 10 light years and the distance from A to C is 20 light years. Theoretically, the distance from B to C could be, for example, 30 light years (these are more like distances between stars, but it is easier to use small numbers as an example). This would give the observer who is in position A a false impression of the gravitational attraction that B and C exert on each other. However, I assume that such things are taken into account in the scientists' calculations.
-
I will now publish all further parts of my work on prime numbers on my Academia account linked below: url deleted
-
The forces acting on this structure are not as great as many seem to think. It only serves to form the Air Pockets. The previous heat protection tiles are also very sensitive and are usually not destroyed when they are re-entered. It was already clear during the test joints that the Starshipt's fins had been unprotected for a long time and although they were particularly exposed to heat and pressure, they did not break off. This means that the Air Pockets walls would hardly break off even if they were heated to well over 1000°. In addition, the aplation dissipates heat, i.e. the structure is cooled. There is another effect that should provide cooling that I haven't mentioned yet. The Air Pockets will slowly but consistently release relatively cool air. This has 2 reasons. Firstly, the walls of the running Pockets are slowly worn away. This means that less air can bind there and thus the Air Pockets themselves are removed along with the walls of the air cushions. This results in a constant flow of relatively cold air around the Starship's hull. A positive side effect is that the walls of the Air Pockets are removed so evenly. If the erosion were stronger in one place, most of the cool air would flow out of the air cushion there. This would mean that very little would be removed there until the level equalizes again. Conversely, a lot is removed where previously little was removed because this area protrudes and is particularly exposed. The removal is therefore self-regulating and occurs evenly. The second reason why relatively cool air is constantly released from the Air Pockets is that this air also warms up slowly. This increases their volume, which leads to the Air Pockets “overflowing”. It's like slowly heating a glass of water that's filled to the brim and it then overflows. This overflow also leads to a thin but constant flow of cold air around the Starship, which should also keep the temperature down.
-
This is extremely helpful. Thank you! I'll definitely go through this carefully. However, the Starship appears to have a maximum temperature of 2600 degrees Fahrenheit or 1430 degrees Celsius during re-entry. At least that's what it says in the following link: https://www.ndtv.com/world-news/watch-spacex-starship-stunning-return-to-earth-moments-before-it-was-lost-5242748
-
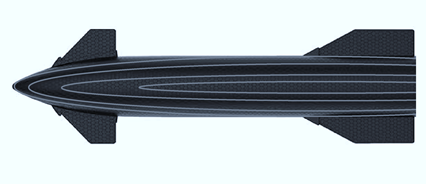
True, but steel could work. The melting point of steel is around 1500°. It is heavier but also more stable. So less material would be needed. In the end one have to calculate it. The heat should remain below 1500° when re-entering. Since heat is dissipated through melting it could be enough, but without the ability to calculate this it remains an estimate. Here is a somewhat more realistic picture of what such a structure can look like. It probably shouldn't be a honeycomb structure due to the aerodynamics at take-off. This shape is also better suited to forming air pockets upon re-entry. The grey lines on the bottom are intended to symbolize the printed metal lines. Of course, the size of the lines and air pockets is not realistic and would have to be calculated precisely. This graphic is only intended to give a better idea.
-
Thanks, I remembered that completely wrong. I thought the melting point was over 2000°. But you are right it is at 660.3°. However, since it dissipates heat again through ablation, it could still be suitable. It is supposed to partially evaporate to dissipate heat. The additional layer of insulation is an important point. I forgot to mention this in the description of my concept, but of course it would be necessary to apply an insulating layer in between.
-
The material is still an open question. Aluminium would be a possibility. It is light, relatively durable and heat-resistant. It is also suitable for 3D printing. But there might be better materials. Therefore, the question of a more suitable material is one of the 4 questions that I formulated at the end.
-
It would take less work to replace this system if it could be done with 3D printing. Alternatively, it could probably be manufactured and anchored in individual parts. This should still be more efficient than the heat protection tiles. Spacex itself is currently looking for an ablative system for heat protection. As mentioned at the beginning, the Space Shuttle failed because of these tiles. Each individual tile has an individual shape adapted to the hull. Furthermore, they are very sensitive and expensive.