CasualKilla
-
Posts
178 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by CasualKilla
-
Hi guys I am really, really struggling to find the full saturated B-H curves for different ferromagnetic materials. So far the only data I have been able to find is third quadrant magnetization curves or normal (virgin) magnetization curves. Looking for something in an excel table, but I can also make due with pics if that is the only option. The reason I need this is to match a hysteresis simulation to some measured results. CK
-
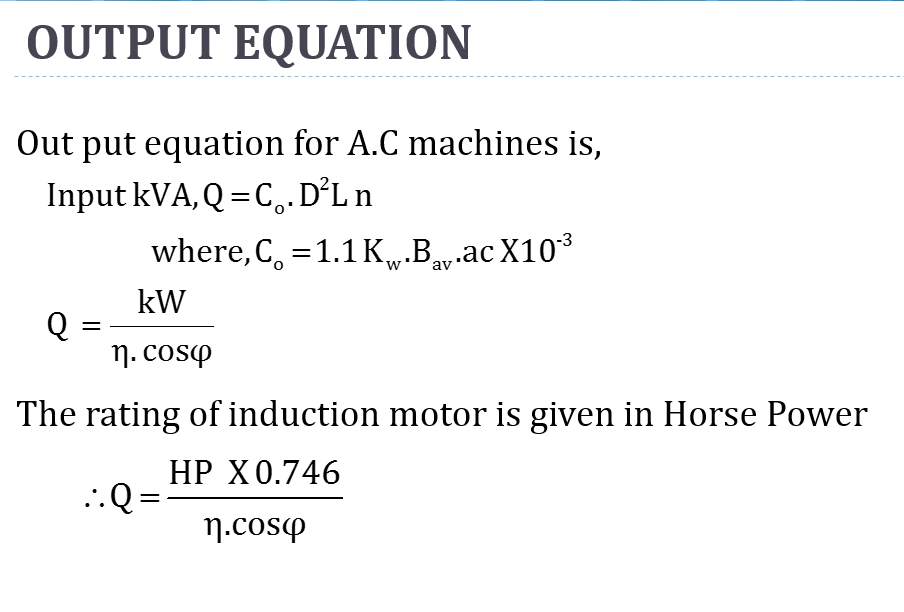
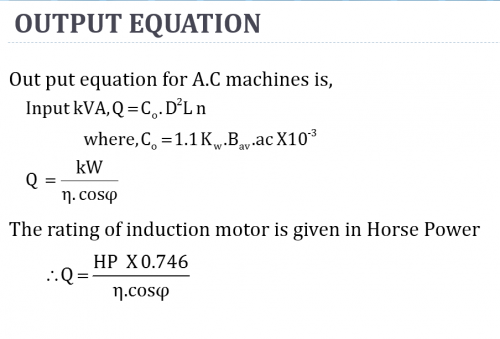
Hi Looking to get some understanding of machine sizing, but I cannot seem to find a source for the derivation of these output equations for the IM/SynM. Could anyone help with this derivation or point me in the direction of a source? CK
-
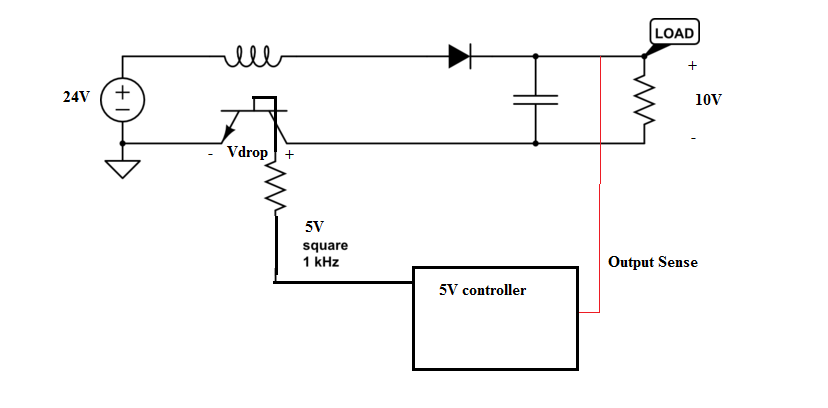
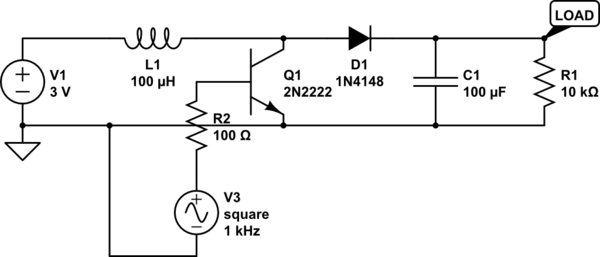
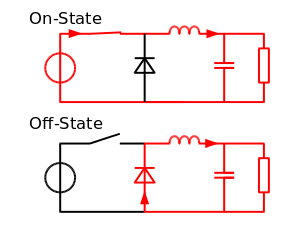
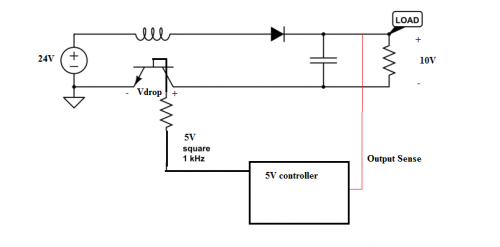
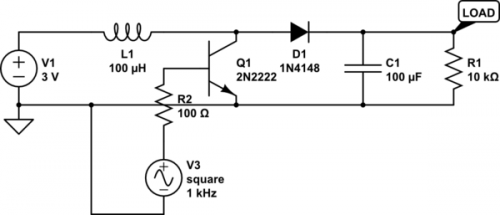
I am trying to test a simple buck converter on 123D.circuits, but for the life of me I can't figure out how to make this work properly with NPN transistors. Lets say for the moment I want to convert 24V to 10V. Basically I want a to drive the base of an NPN transistor with a 5V control pin. The reason for this is that the 5V controller voltage is more stable than the input voltage of the buck and I don't want massive variation in my base current when it is sinking into the controller. Now the problem comes with the fact that there seems to be no good position to put a NPN transistor in the buck circuit. I have been googling around and have seen the circuit below a few times now, but it doesn't seem to make any sense, since the inductor is not in series with load when the square wave is high, so it is different to a normal buck. Anyway, the best I have been able to do is the following: Which seems to have the problem of the output and input voltage not have the save reference due to the voltage drop across the NPN transistor. This may make it difficult to sample the output with the controller then the controller needs to be grounded to different grounds. I remember having a similar problem when designing a NPN H-bridge a while ago. Am I missing something, or is it the case that sometimes the requirement ie. NPN with base driven by 5V controller not possible and I just need to use a different transistor type or accept that the controller is going to be sinking highly variable current due to variable input voltage?
-
High power pulses killing low power resistors
CasualKilla replied to CasualKilla's topic in Engineering
Yes you helped did alot. Sorry I could not provide better information. I try to do my self study, but am still a novice at many aspects of power electronics. I am doing a course next year. -
High power pulses killing low power resistors
CasualKilla replied to CasualKilla's topic in Engineering
Thanks reponse, I have a few comments on your points. 1) I am not sure, but the datasheet mentions switching frequency and isolation. 2) The 110Vdc rail is produced on a public transport train and is not part of the design, however the specification says it can vary significantly from 70 to 150V. There will most likly already be mainly loads on the 110V rail when connecting the switch. 3) - 4) - 5) I am not sure what you mean by this 6) The input is 110Vdc I think the protection circuitry too much. The datasheet DC to DC boasts that this device "virtually eliminates the needs for protection circuitry", but is hard to determine what is actually needed and what is not. The datasheet is very sparse (http://dtsheet.com/doc/238188/murata-ruw15). Question with regard to removing components: If R25 and R26 is removed, but not the capacitor, I assume this will cause the PCB traces to burn out? Spice is telling be the peak power in the traces with be in the kW range XD -
High power pulses killing low power resistors
CasualKilla replied to CasualKilla's topic in Engineering
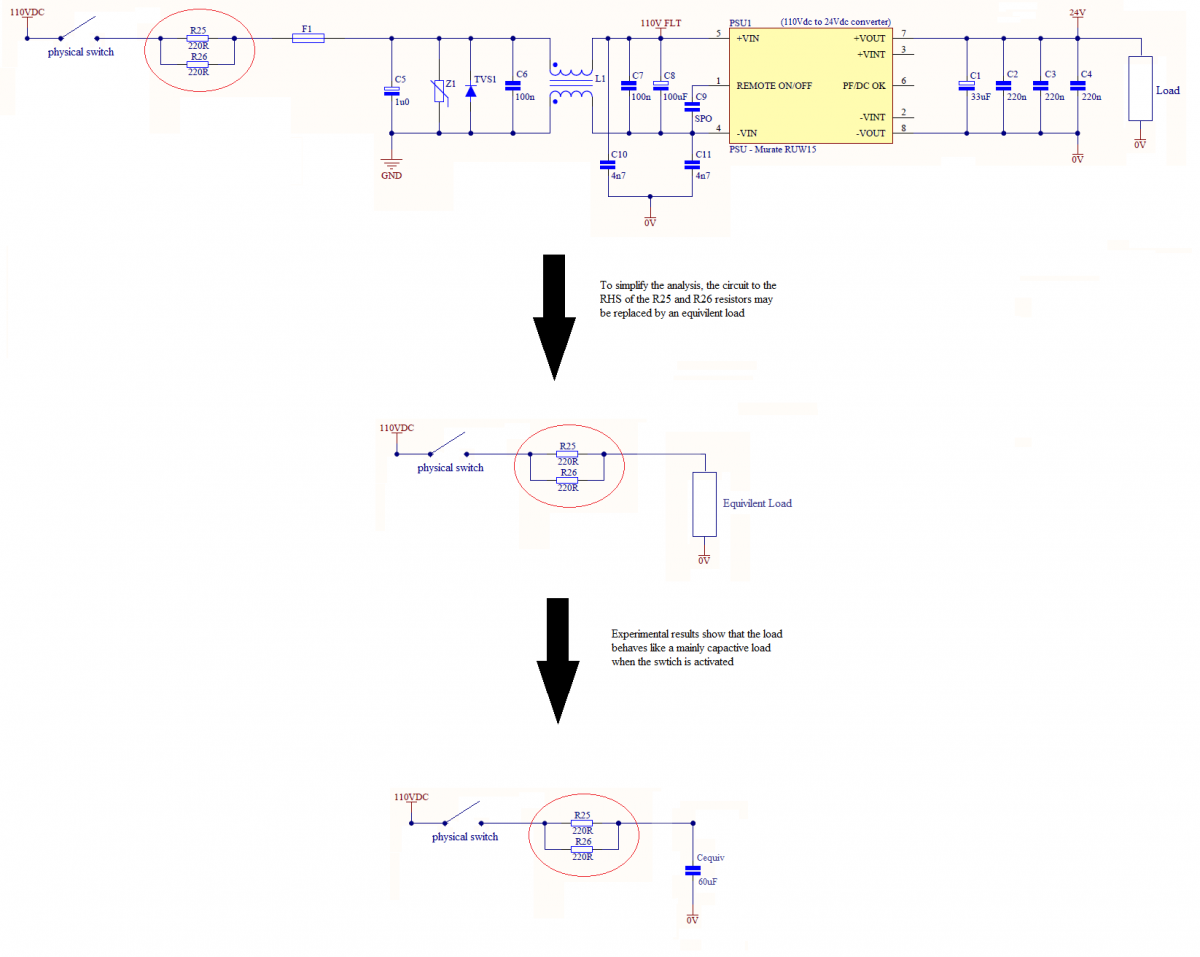
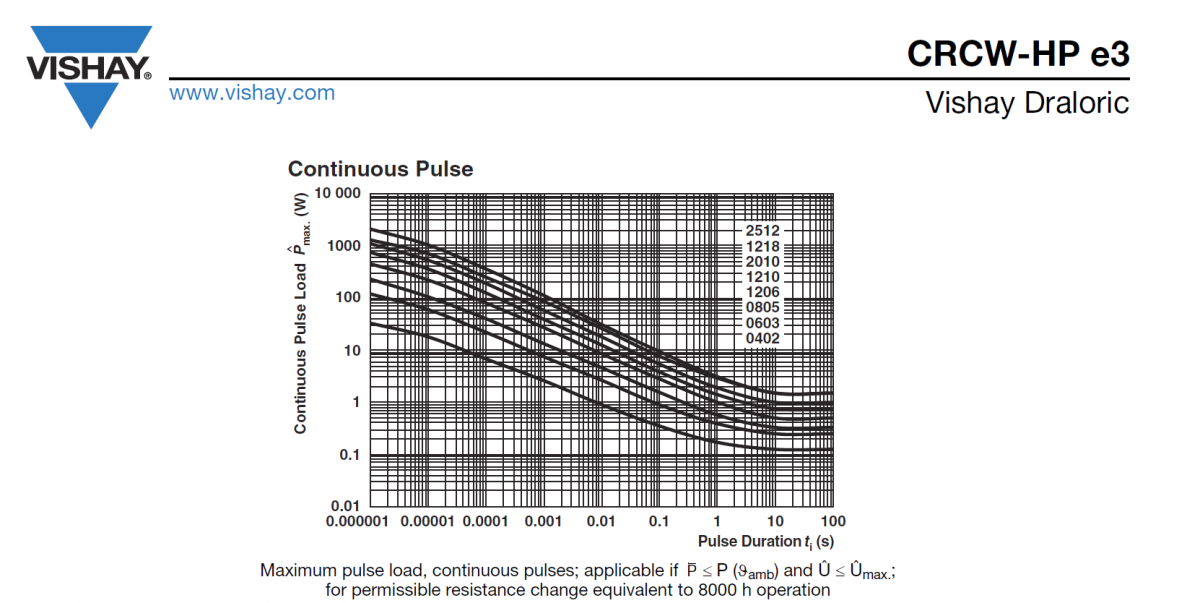
So what seems to be happening is that the 110Vdc to 24Vdc converters input pin is taking time to charge up from 0V to 110V. This means that during startup the equivalent load behaves like a capacitor with negligible inductance and resistance. (see below of the circuit and simplified circuit). This capacitive load during startup also means there is a voltage pulse of 110V across the resistors which dies down asymptotically (shown in first post). The problem with the zener solution seems to be that we require an input voltage range of around 70V to 150V. So the steady-state losses across the resistor will be too large in the 150V case. I plan on using the pulse duration to select for appropriate resistors using the pulse power graphs in certain resistor datasheets. In light of the circuit diagram I provided, would you say the design is flawed? If so, I am open to recommendations, but the problem is the PCB have already been printed and only allow for 1206 package chips, so this is a last resort. EDIT: I should add that we can't make the resistors too large since that would deteriorate the steady-state efficiency too much and may lead to too much heat generation. The steady state output power is only around 1.6W, meaning input current on the 110V is around 15mA. Meaning that a resistance of 1k would lead to a 1000*0.015 = 15V steady state voltage drop and efficiency drop of 100%*((0.015^2)*1000)/1.6 = 14%.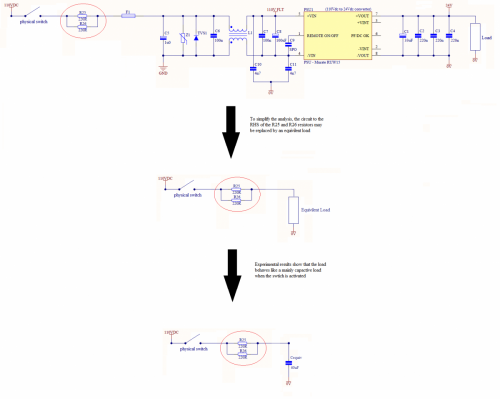
-
High power pulses killing low power resistors
CasualKilla replied to CasualKilla's topic in Engineering
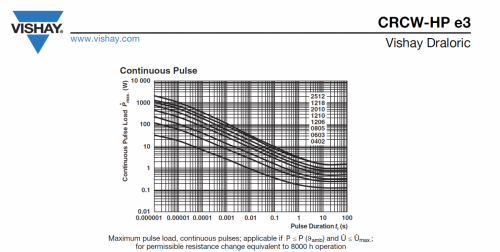
Thankyou for your response. I made a mistake in the power integration and it turns out it is only a 0.76J peak. I will have a look at the datasheets for more info in the meantime. I just need some advice about the pulse duration, since the pulse dies down almost asymptotically slowly it doesn't make sense to take the full duration of 100ms, does one approximate the pulse as by integrating to find the total joules then take joules/Pmax to find the pulse time? -
So I am currently struggling with resistors blowing out on a PCB. They are 1/4 Watt 1206 resistors, The resistors where designed for steady state, but there is a power spike when the device is turned on (Power spike shown below), also, the power spike is shared by two resistors. What wattage resistor do I need to handle this type of spike. The spike will occur worst case average every couple minutes but generally only every couple hours. Draft2.bmp I am currently testing with 10W resistors, which don't even get mildly hot with these spikes so I know these would be overkill.
-
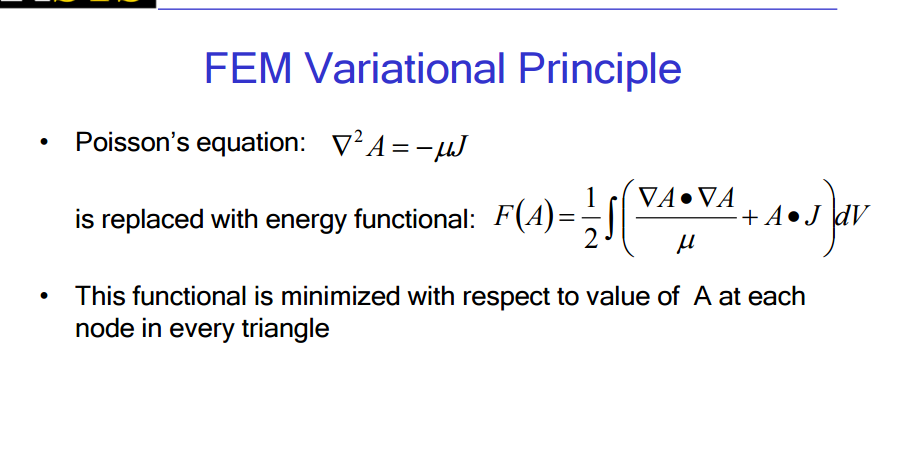
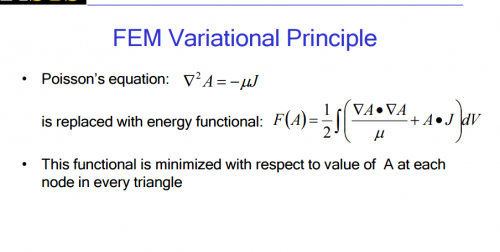
I am working through a software tutorial and there are two very ambiguous equations where the variable names are not described (below) and mostly just confused about the Source document: http://ansoft-maxwell.narod.ru/en/CompleteMaxwell2D_V15.pdf
-
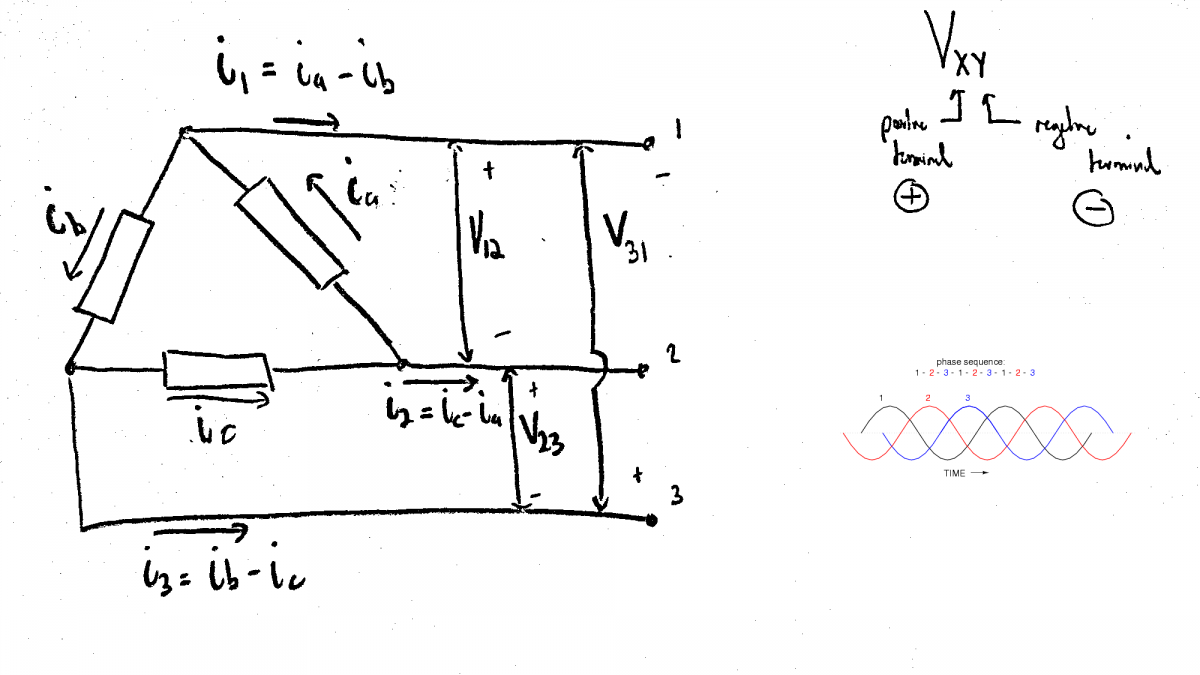
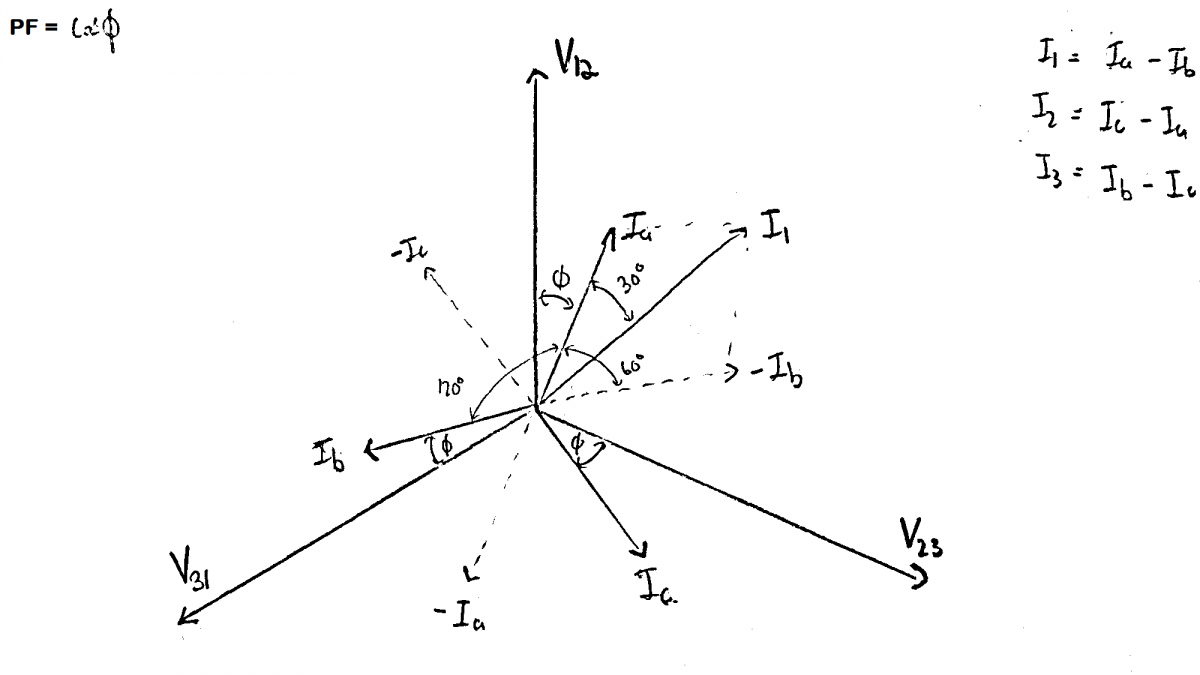
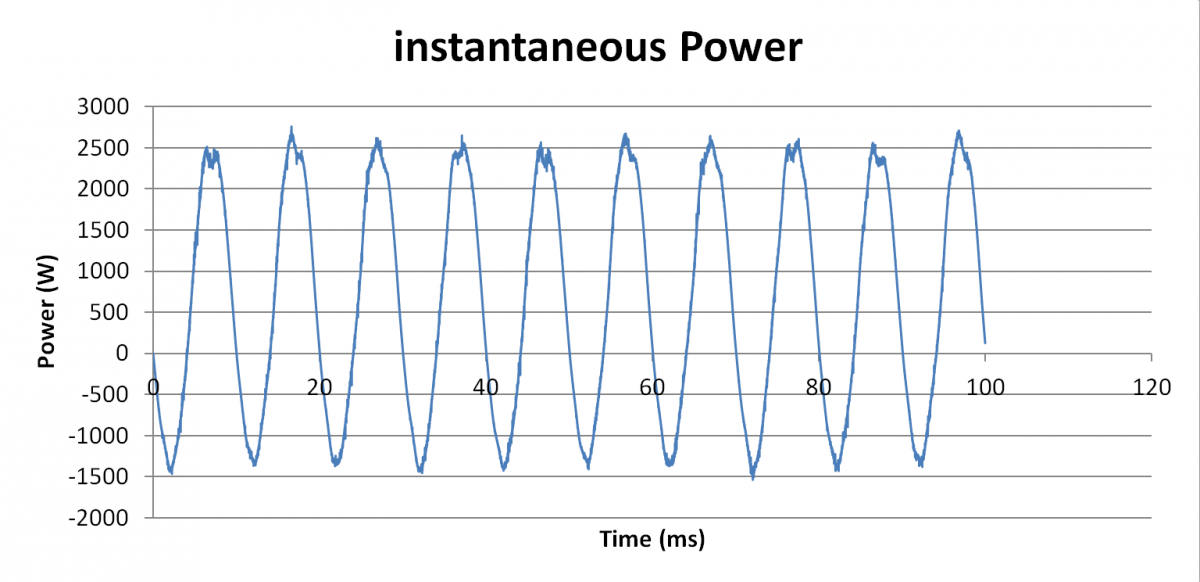
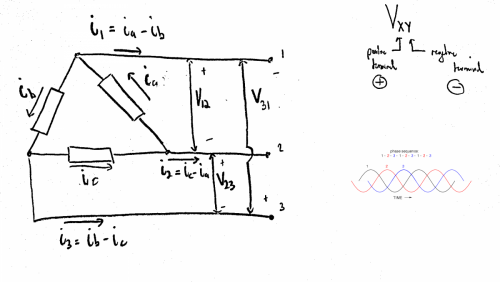
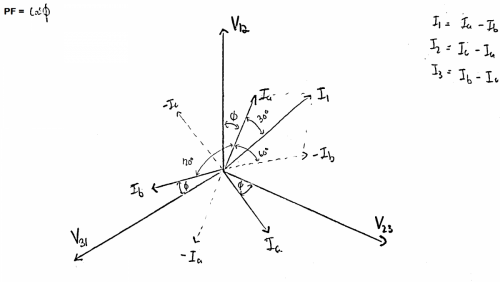
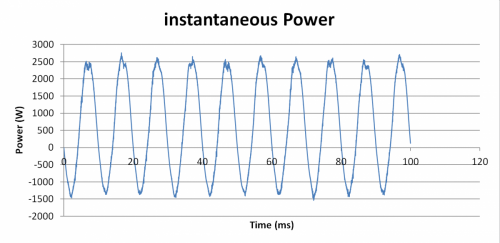
So the first figure is the instantaneous power P1(t) =V12*I1 of a balanced 3 phase delta load. How would I determine the average power and power factor of the load? I assume the average power is just the mean of P1(t) or the mean of abs(P1(t)) ? Assume I also have access to P2(t) =V23*I2 and P3(t) =V31*I3 as defined below.
-
There seems to be countless resources that describe how to draw a matrix, how to number the elements, how to add matrices, multiply them etc. However, there seems to be very little information describing what exactly the matrix represent and why it is important. Also, why are addition and multiplication defined as they are? Matrices always felt very non-intuitive to me and I hope by achieving better fundamental understanding I can overcome this. If you know of a resource that describes this well or would like to give your own explanation please do.
-
Understanding the RSM (reluctance synchronous machine)
CasualKilla replied to CasualKilla's topic in Engineering
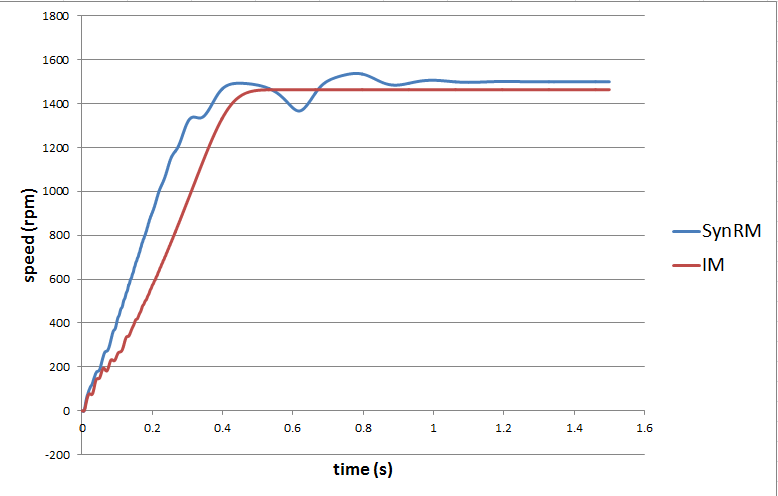
Hi Enthalpy! Yes, I also have some concern about the mechanical strength of the rotor, but I think the squirrel cage will add some mechanical strength in the radial direction (normal designs do not have the squirrel cage), otherwise I hope there is enough time to make a second prototype. I will examine what performance drop is expected if I add some radial ribs. This is effectively a synchronous motor and the induction bars are used purely to start the motor on a constant 3-phase voltage supply. So the induction bars are only active for the first 2 seconds as the motor accelerates to steady state. This means a motor controller is not needed to start-up the motor as with normal synchronous machines. The application of this motor would be constant operation at a constant speed and torque such as a fan. Here is a comparison of the starting responses of my synchronous reluctance motor compared with a induction machine in the same stater and for the same line voltage. Note, the synchronous speed is 1500 rpm (50Hz 4 poles).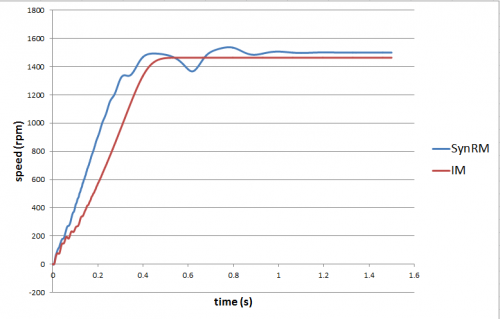
-
Understanding the RSM (reluctance synchronous machine)
CasualKilla replied to CasualKilla's topic in Engineering
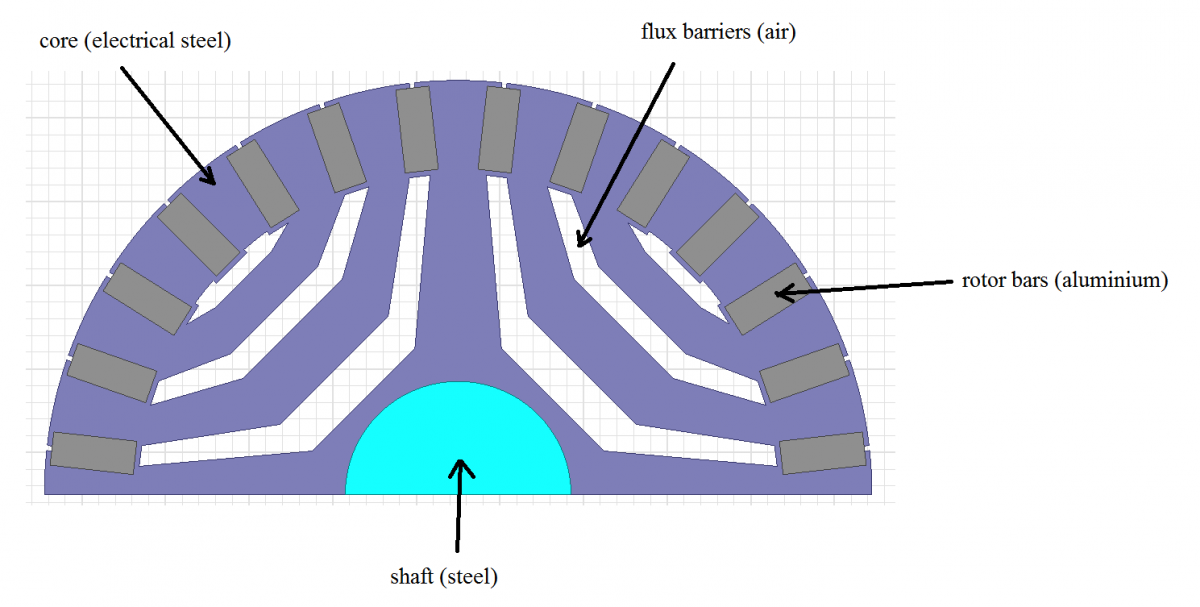
So few months later now, and I still don't fully understand this type of motor, but I have gained sufficient understanding to create and optimize a line start synchronous reluctance machine (LS-SynRM) within simulation software. Here is my finalized optimised geometry if anyone is curious. Stimulation results show better performance (effeciency and power factor) than an inductance motor using the same stater and for the same load, so it seems like a good result.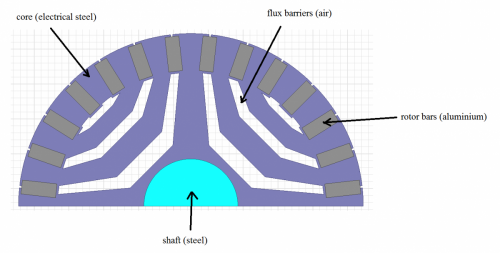
-
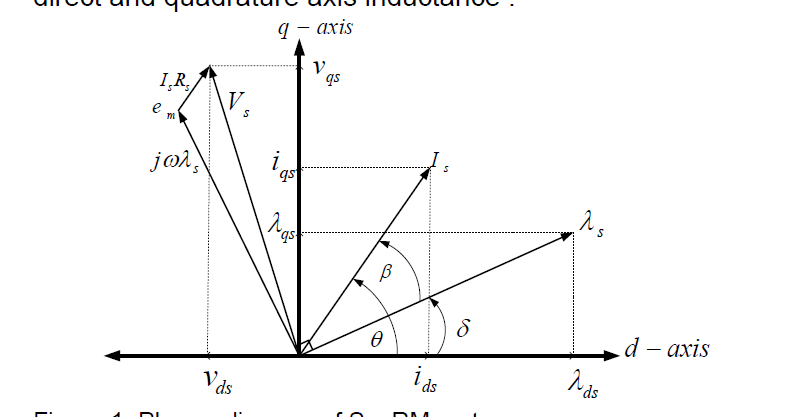
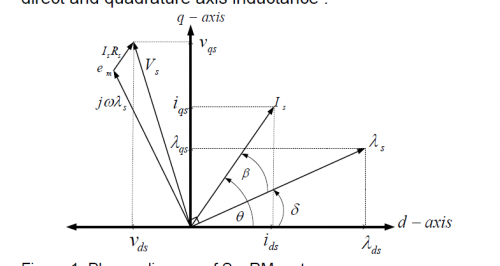
I have been using mspaint to make figures, which proves tedious and leads to scruffy results. I need to make a couple very simple vector diagrams and simple graphs. Something that would easily allow me to re-create the attached file would be perfect.
-
I think skin starts cooking at 60 to 70C. Think you may have phrased your question since water needs to be 100C (or higher) to be steam
-
I was just burnt myself after making some food in the oven. The towel (fabric) insulated my hands for a short time, but the heat shot up rapidly after before I could react. My question is, would I have been better off wetting the towel first? Intuition tells me the wet towel will heat up more gradually (better thermal capacitance?) giving me more time to react, but the wet towel should be worse at steady state, since I think water has a better thermal conductivity than the dry fabric. Normal usage is probably shorter than the time taken to reach stead state, so i assume this is not a factor. Thoughts?
-
Help finding equivalent resistance for BJT circuit
CasualKilla replied to CasualKilla's topic in Engineering
I appreciate you trying to point me in the right direction, but I understand the theory quite well, I have done probably 100's of similar problems, but I am just having trouble with this particular circuit, so I would appreciate some help tackling this particular problem. Here is an example of how I normally solve these problems. To give some context to why I need to do this, there is normally an capacitance in the circuit, so we need the equivalent resistance the capacitor experiences to find the time constant.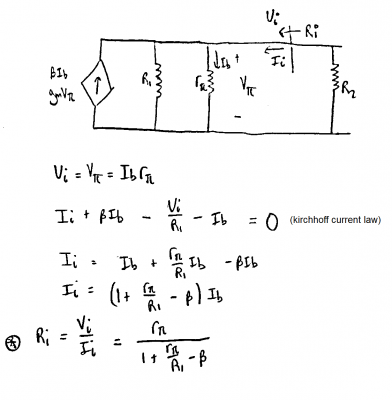

-
Help finding equivalent resistance for BJT circuit
CasualKilla replied to CasualKilla's topic in Engineering
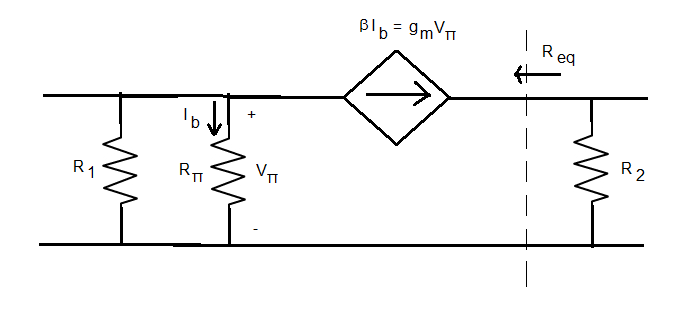
I think you are right, perhaps it is a Thevenin equivalent, if not, it is closely related, but what I need to do is pretty much need to replace the LHS of the circuit with a single resistor. I normally don't have any problems with these, but this particular example is giving me issues. final result should look like this: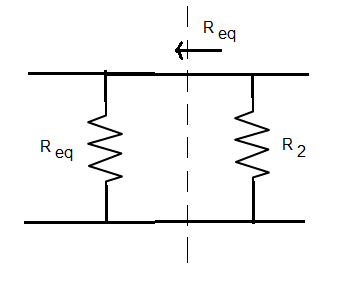
-
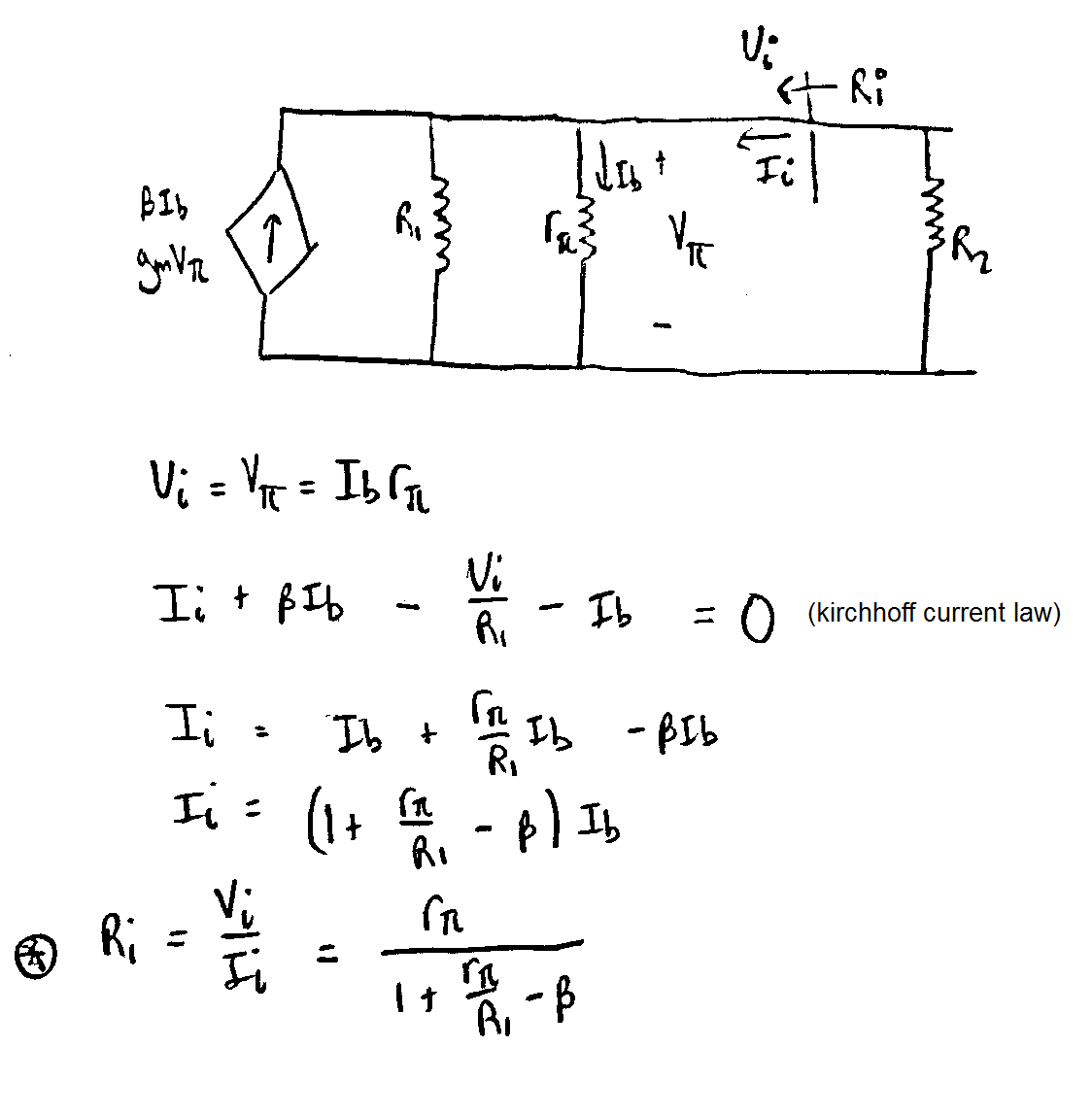
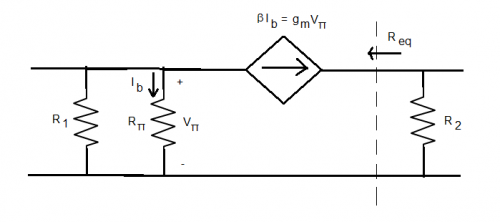
I would like some help understanding how to find the equivalent resistance of the circuit as shown in the included figure. I also want to clarify another thing; when finding the input resistance for the section, do we completely ignore the other side (RHS) of the circuit? The reason I ask this, is that normally I solve for Vx and Ix at the Req point and then Req = Vx/Ix; in this case it is not possible to solve for Vx without using the RHS of the circuit.
-
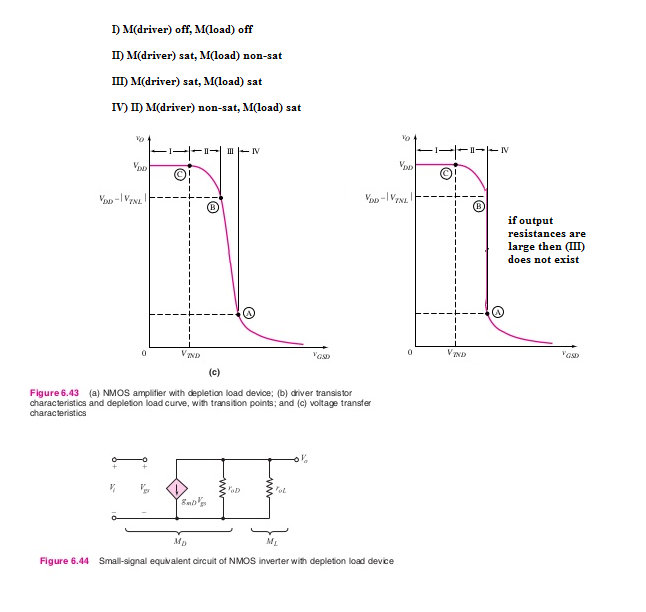
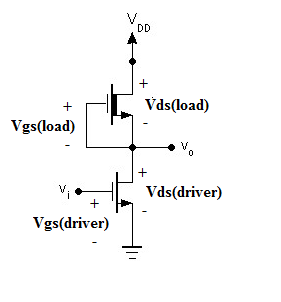
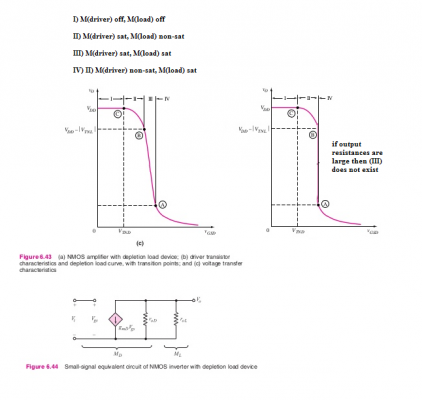
I need some help intuiting the input vs output characteristic for the NMOS depletion load circuit. For example, I can see why the driver should start off saturated then move towards non-sat as Vinput increases, but I cannot see why the load should start off non-sat. Additionally, if we assume the output resistances to be large, then the driver switches to non-sat and the load switches to sat at the exact input voltage (which doesn't seem obvious to me). I have attached some figures to illustrate the problem.
-
Didn't bother to read a 5 page post on perpetual energy, but these things where we have water on the one side of the device and air on the other can more often than not be explained as a heat engine exploiting the difference in temperature between the two mediums.
-
Im curious, if this technology is used to store energy for 2 or 3 days without usage, what % of the total stored energy would be lost from friction, air resistance etc. 1% efficiency does not really makes sense in this scenario.
-
I have always found it strange than humanity hasn't really found a good way to store electricity. Chemical batteries, how primitive. Now we are proposing equally primitive rotating masses to do the job (no offence). Is there corporate interest to suppress energy storage technologies? The automotive industry does come to mind, good energy storage would make electric cars very viable. This does seem like a very cheap solution, but don't we also need to consider that we need generators attached to the wheels, which too have losses, and then we need circuitry to produce a fixed frequency and voltage power from what I assume would be a varying frequency voltage and current produced by the generators depending on the flywheel speed. Chemical cells still have the advantage that they don't need a middleman to convert to electrical energy.
-
I can entertain the idea that analytic models of the universe could be incorrect, but how do you explain the simulations that require the majority of the universe to be dark matter for a structure representing our universe to form? Surely, if your idea is right, we would see the structure without the need for added dark matter. Are you proposing that they used the incorrect equations for gravity?
-
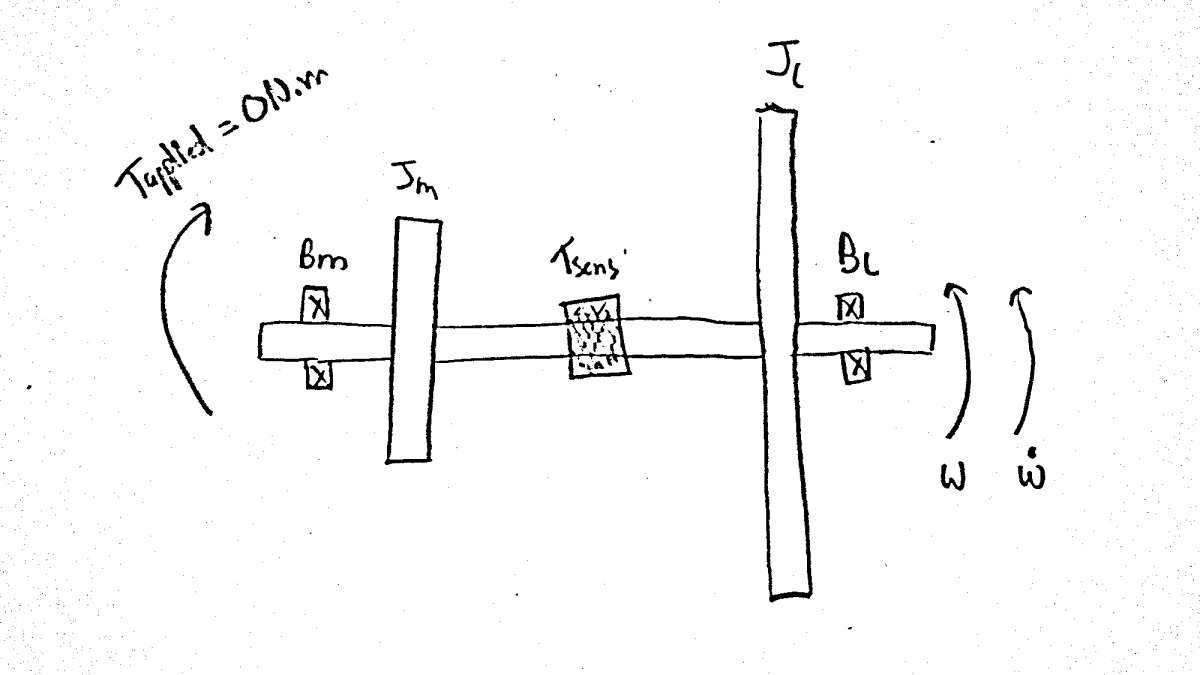
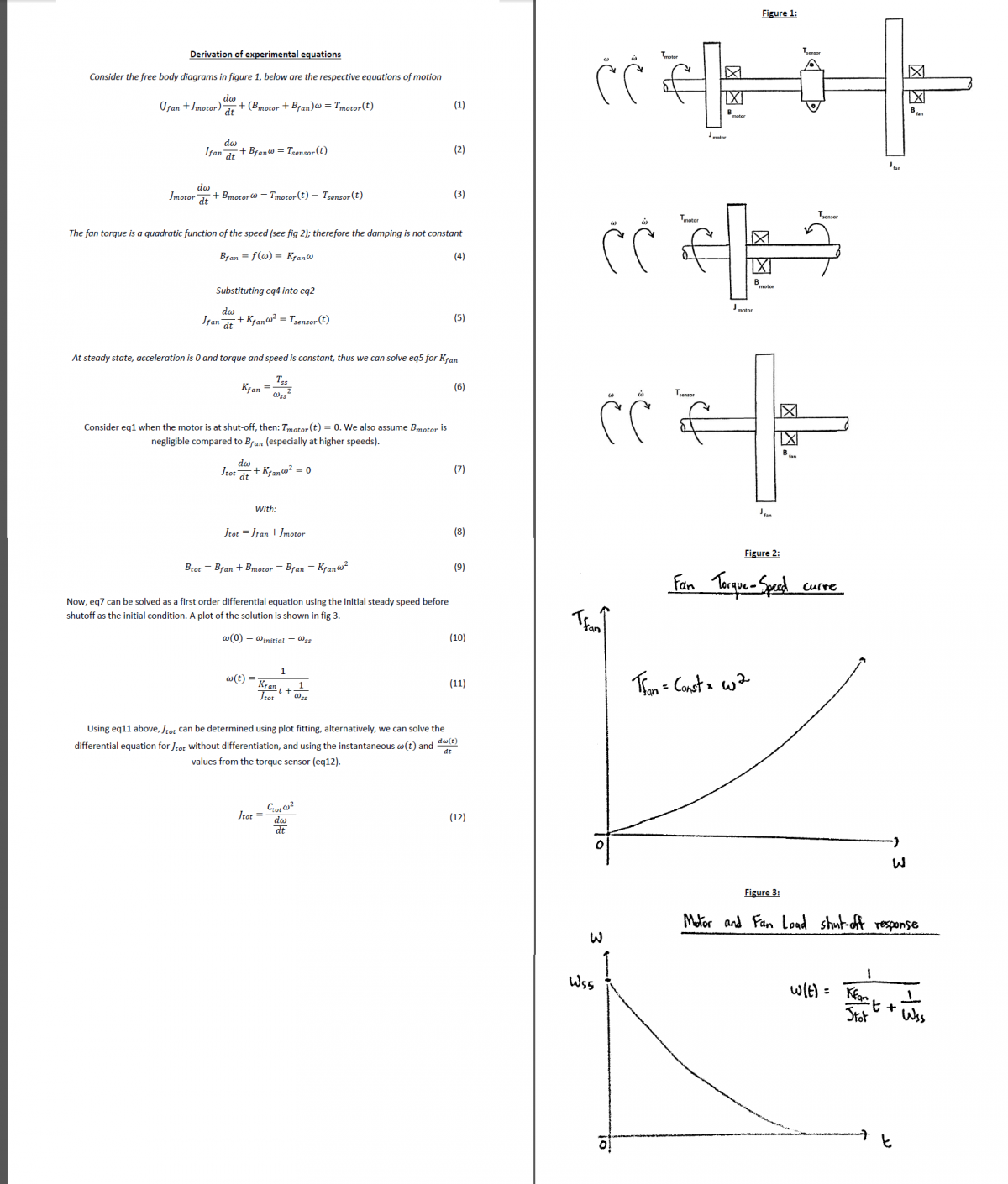
Experimental Analysis of a Synchronous AC Motor and Fan Load
CasualKilla replied to CasualKilla's topic in Engineering
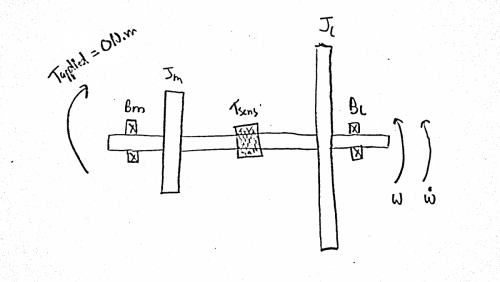
In that case, would it be better to model the bearing friction torque as Tbearing = constant * (w^2) ? I plan on doing a shut-off test, but I am curious, will there still be a reading on the torque sensor when there is no Motor applied torque? If so, what is the value of this torque reading, I have included a model below. We assume the shaft is turning at a initial constant speed w.